

学びプラス情報
【CAD】目から鱗!AutoCAD構築線の有効な使い方「トレース法」
-
CAD
記事のカテゴリー
-
CAD
こんな方に読んでほしい
-
CAD講座受講生
記事から得られること
-
AutoCADによる正確で、スピーディな作業のテクニックや勘所。
第10話 AutoCAD作業の勘所シリーズ ~その1 「トレース法」~
1998年から、ヒューマンアカデミーでCAD講座を担当させていただき、これまで多くの修了生を輩出して来ました。
修了生の皆さんは、現在、ベテランCADエンジニアとして活躍していますが、受講生の頃は、以下のようなご質問を多数、受け付けました。
・作業が思い通り進まず、つまづいています。何かコツがありますか?
・ベテランCADエンジニアの勘所は何でしょう?
今回から、受講生の皆さんが
・どこで、つまづいているのか
・また「その打開策はなにか」などについて解説して行きたいと思います。
今回は「AutoCAD構築線の有効な使い方」をお話しします。
これからお話しする手法は、弊社取引先のベテランCADエンジニアが好んで使う手法です。 あまりにも正確で、圧倒的に素早い作業に、「目からうろこ」でした。
良いものは、遠慮なく取り入れましょう。 皆さんの、CAD製図作業のご参考として下さいね。
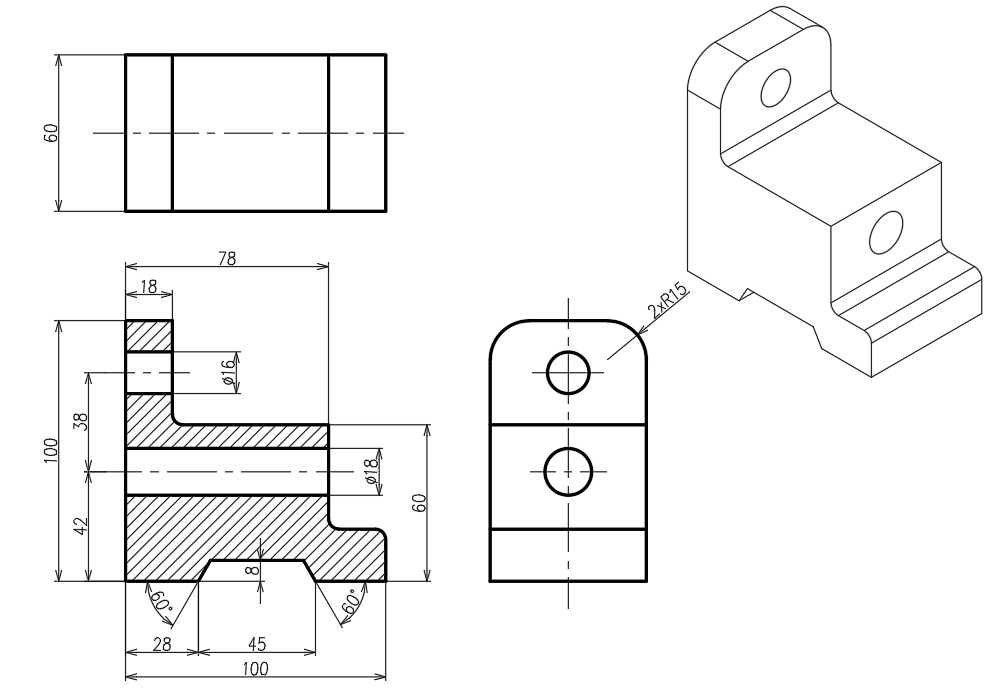
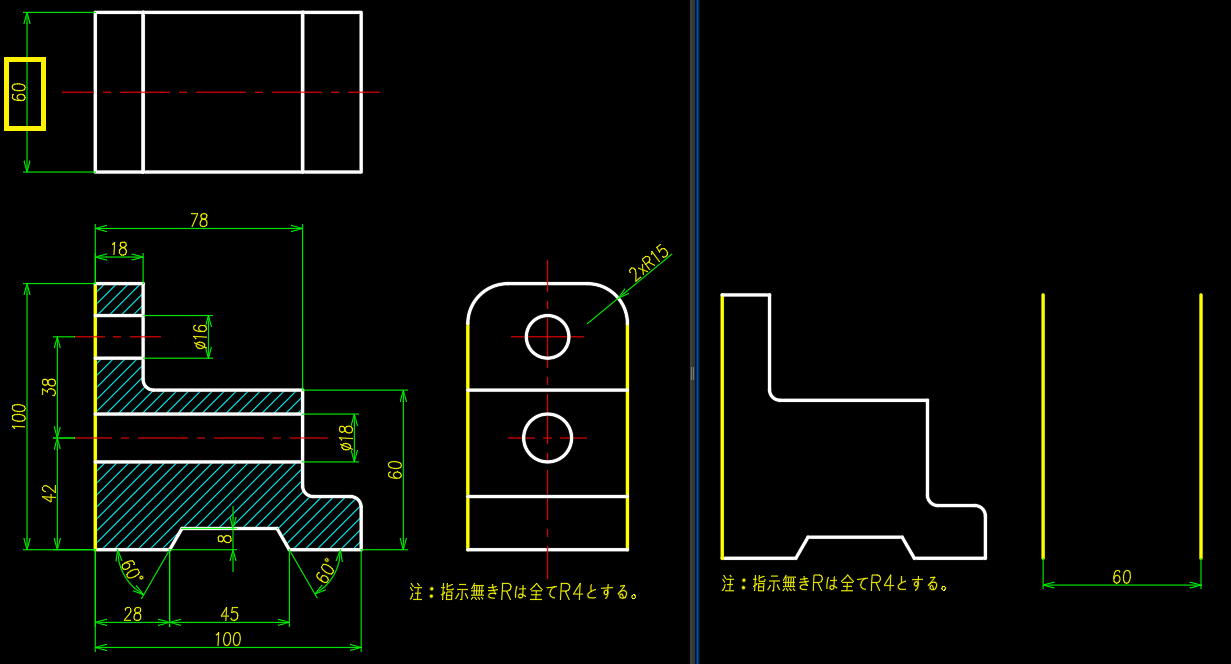
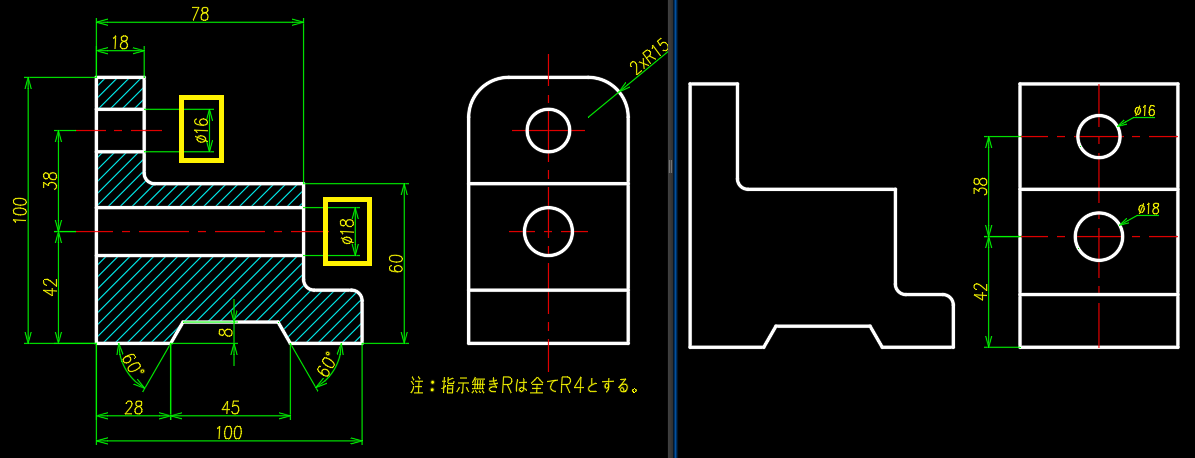
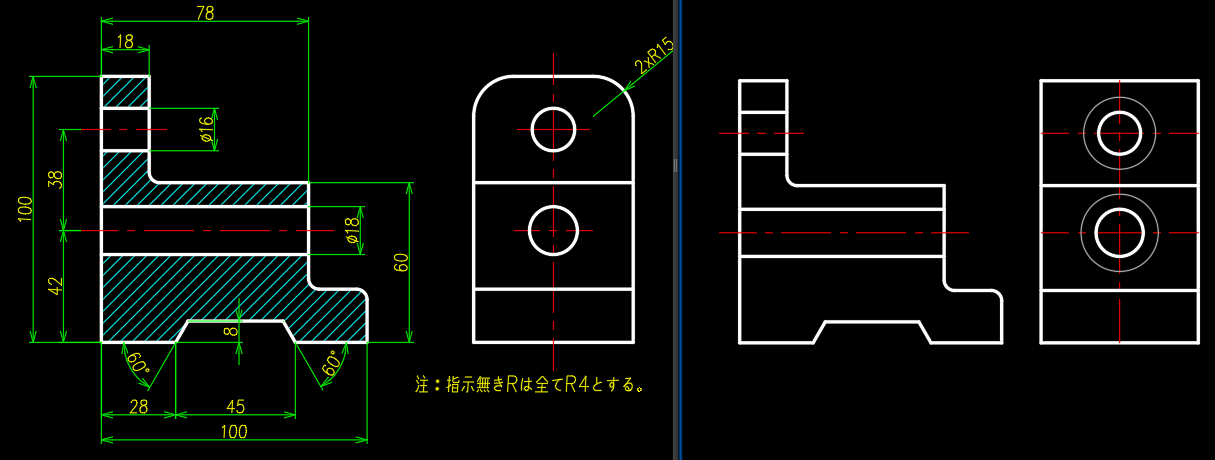
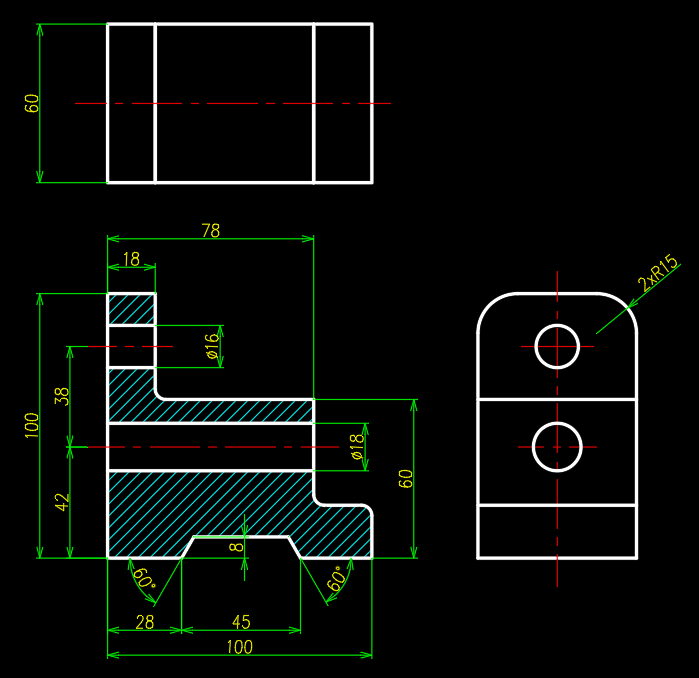
今回の課題図面
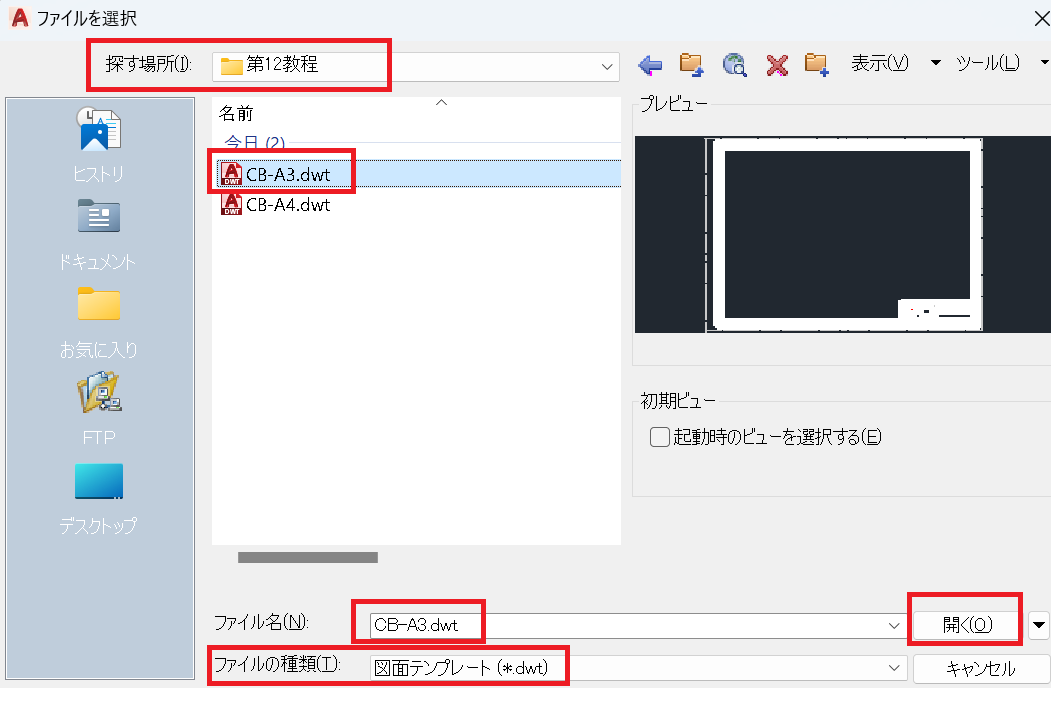
AutoCADを立ち上げ、テンプレートを開きます。
おススメは、コマンドベーシック講座第12教程 CB-A3.dwt
非常に使いやすく、優れたテンプレートです。
先ず、最も情報の多い、正面図から作図を開始します。
全体のボリュームから掴んでいきましょう。線分コマンドで線分を作図します。
図面に従ってオフセットします。
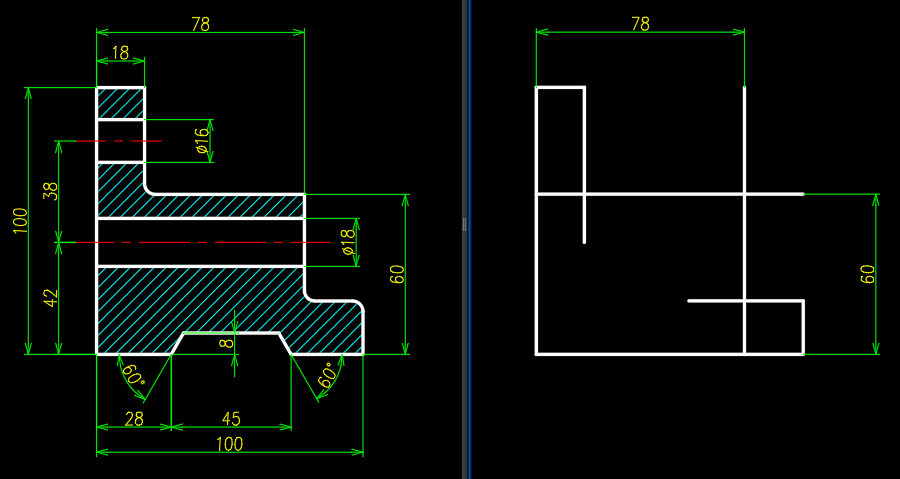
一旦、トリムでスッキリ仕上げておきます。
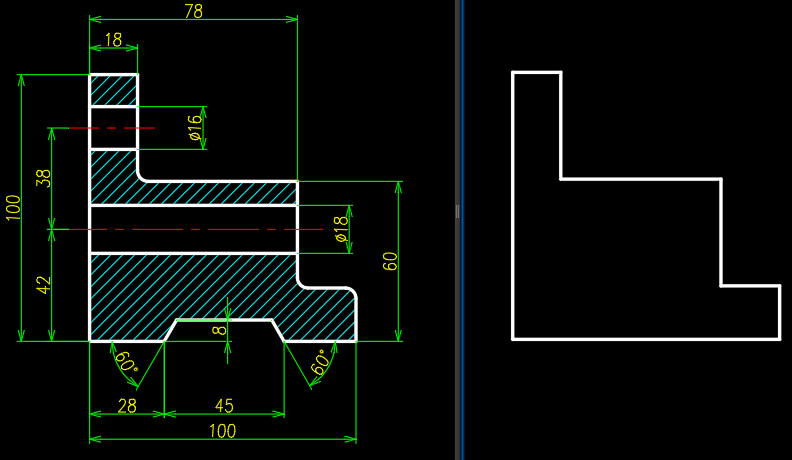
全体のボリュームをつかんだら、細部を作図して行きます。
台形くりぬき部の作図
先ず、図面に従って28mm、45mmオフセットします。
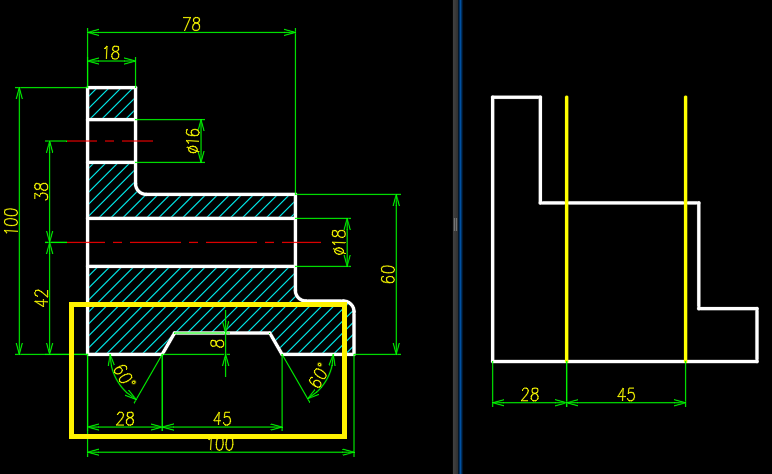
オフセットした線分をそれぞれ、-30°、30°回転します。
8mmオフセットします。以上で、台形くりぬき部製図の段取り完了です。
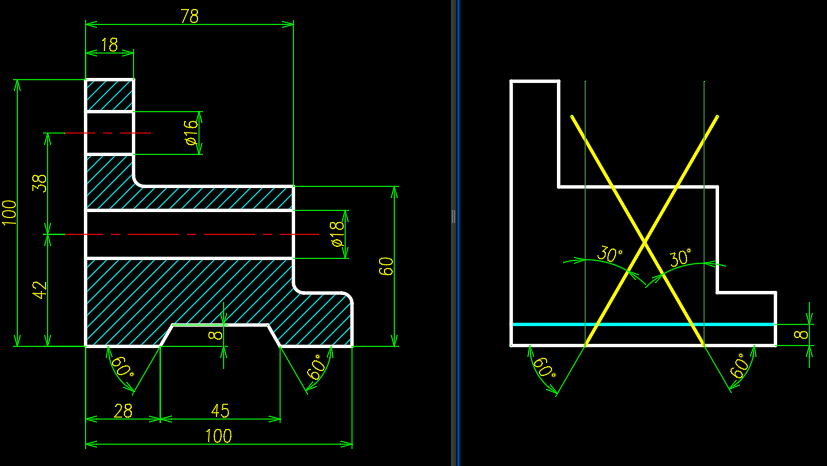
トリムで台形くりぬき部を仕上げます。
フィレット処理
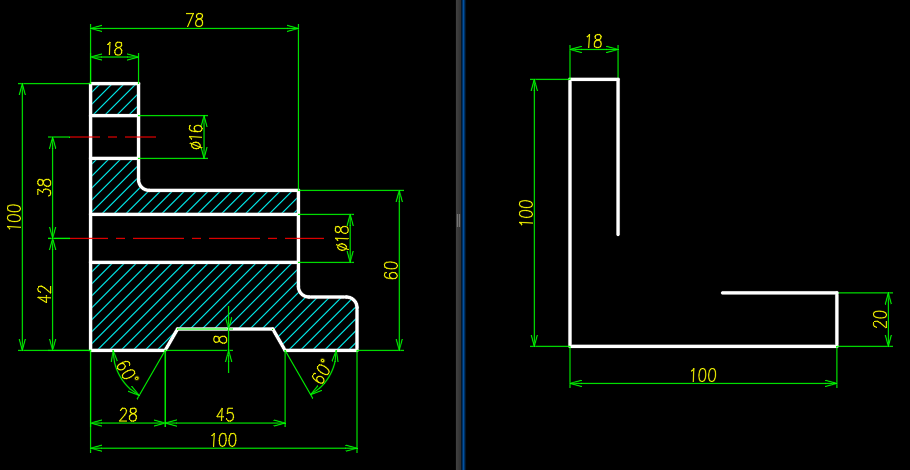
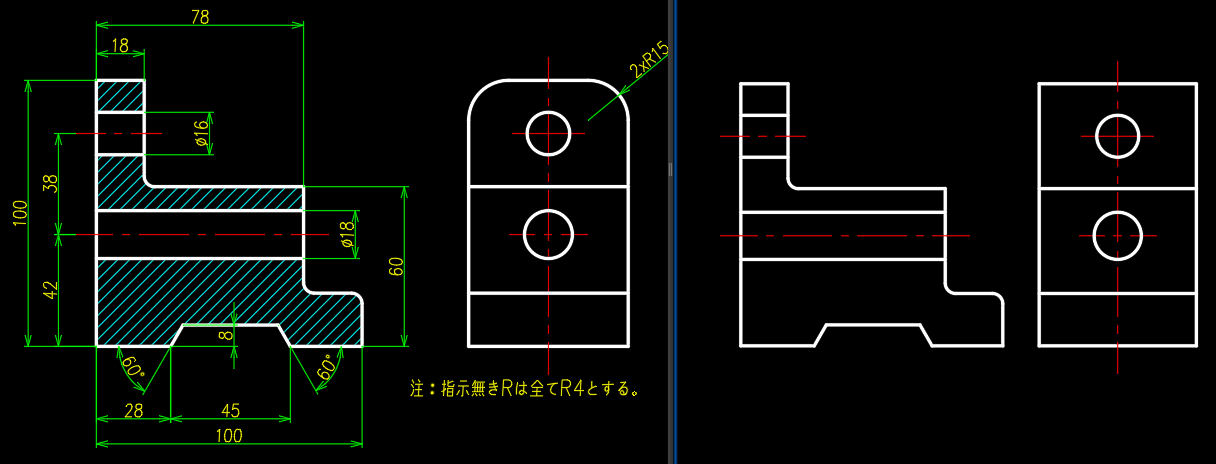
続いて右側面図の作業です。
図面に従って、複写及びオフセット
線分 中心線
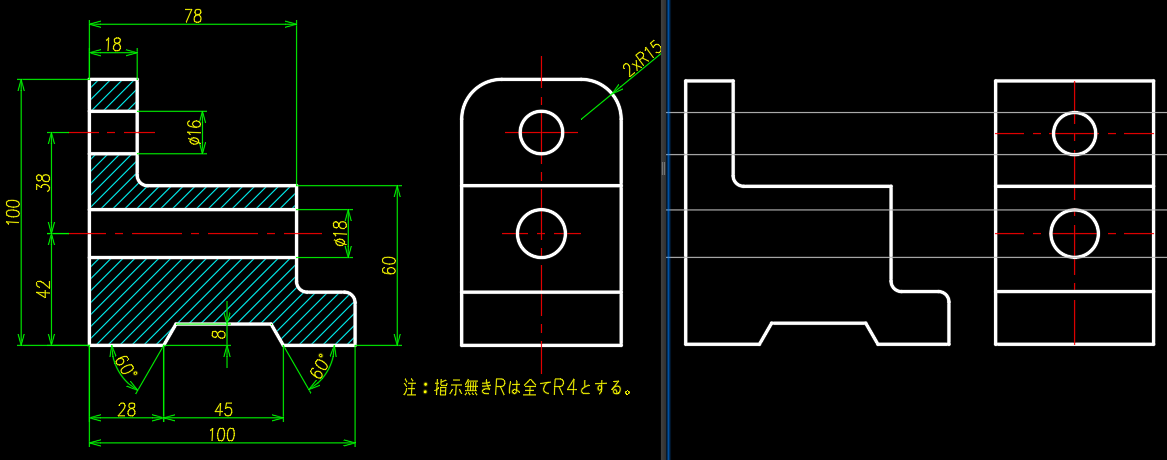
水平構築線で投影の準備
構築線は、レイヤ「 0 」に変更しておきます。レイヤ「 0 」を下書きに使用します。
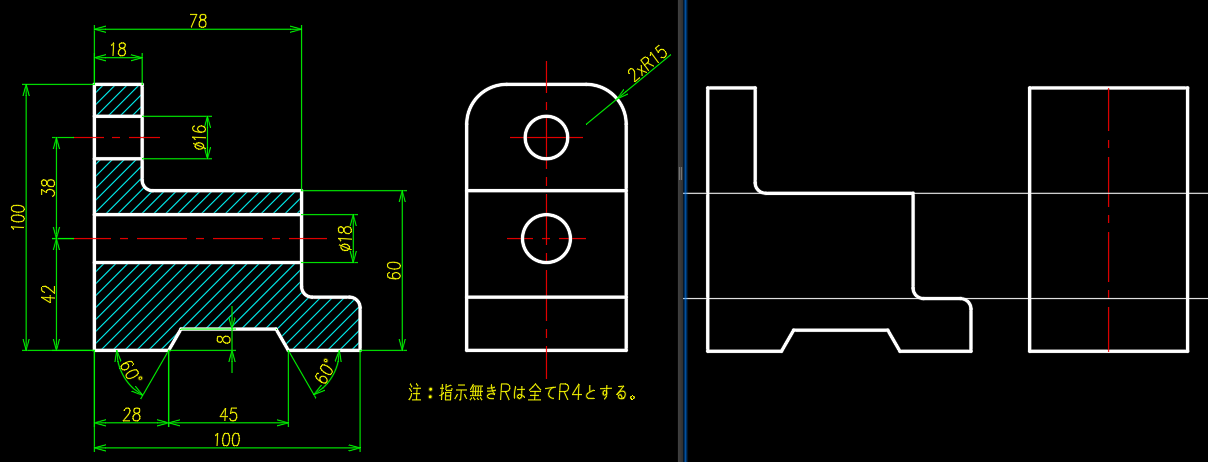
線分で「トレース」します。
※現場では「なぞりがき」と言います。
トレース後、下書きの構築線を削除します。
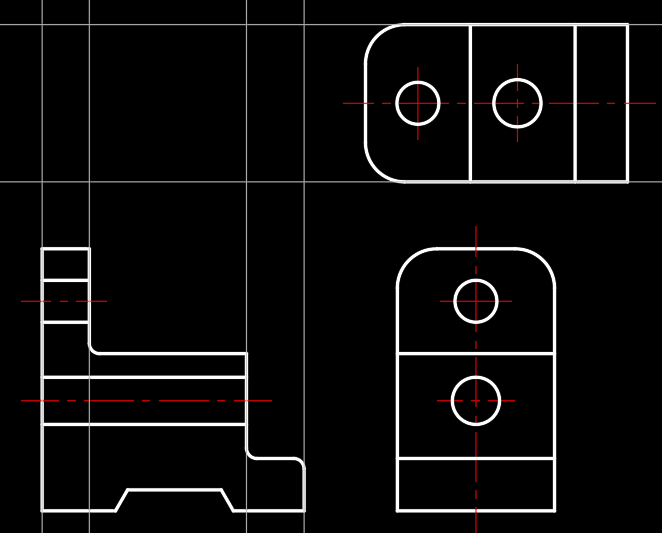
続いて、穴あけの段取りです。
先ず、オフセットにより穴位置を決めます。
穴あけ
円を描きます。
穴の投影
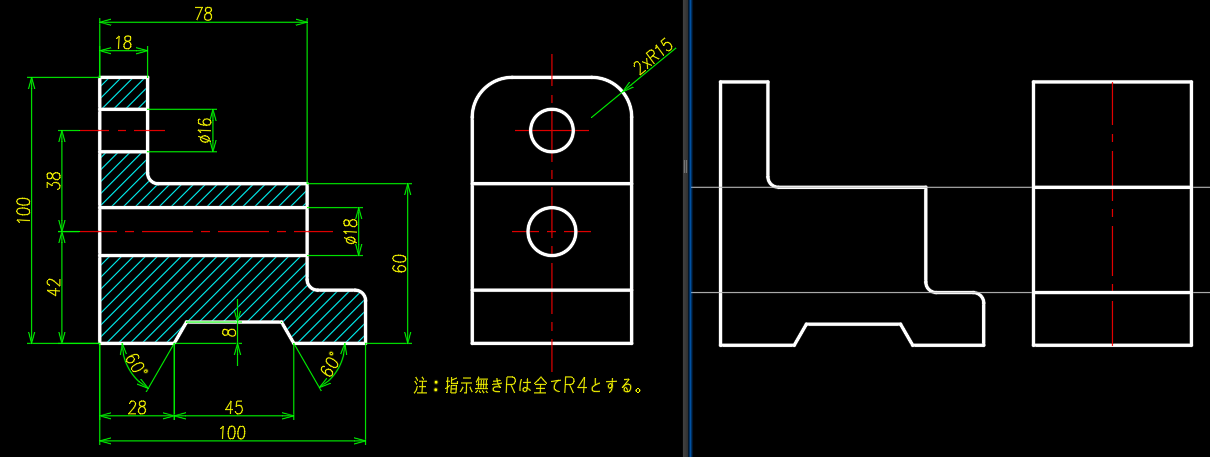
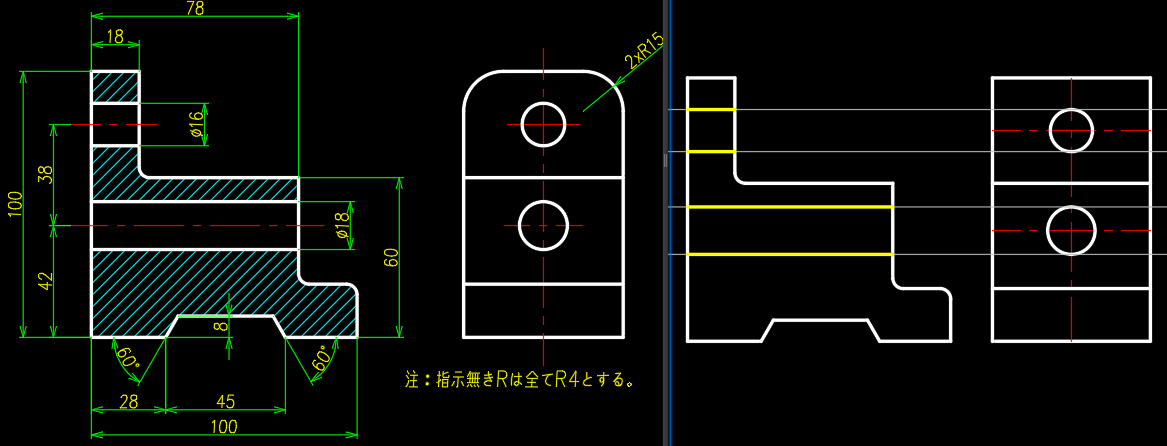
穴の四半円点を通過する水平構築線を作図します。
構築線は、レイヤ「 0 」に変更しておきます。
線分で「トレース」します。
穴の中心線を複写します。
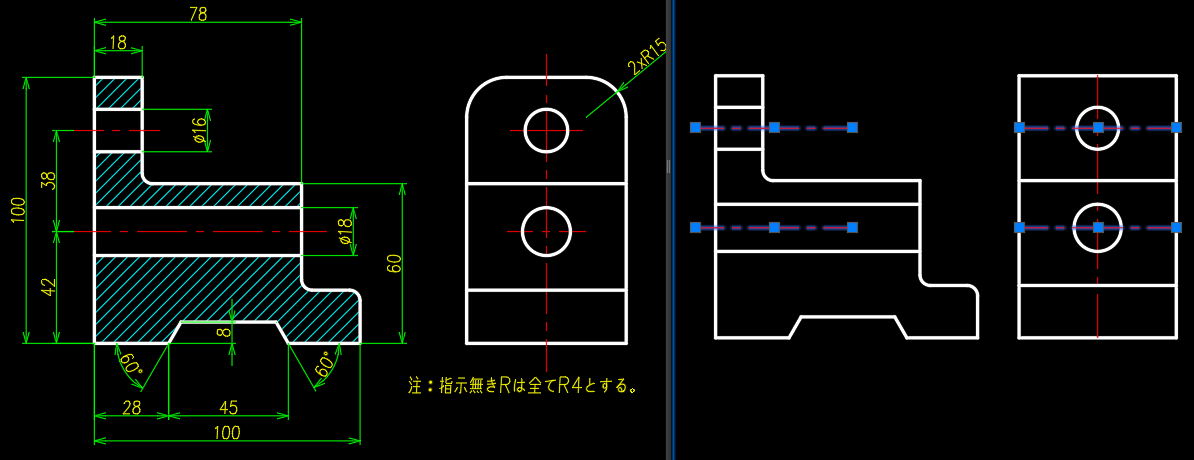
ストレッチで、複写した穴の中心線の長さを調整します。
穴の中心線を短くするために、補助円を描きます。
補助円で中心線をトリムし、短くします。
※長さ変更、ストレッチ、尺度変更などの方法は補助円が不要です。皆さんの得意な方法で処理して下さい。ストレッチで、基本中心線の長さを調整します。
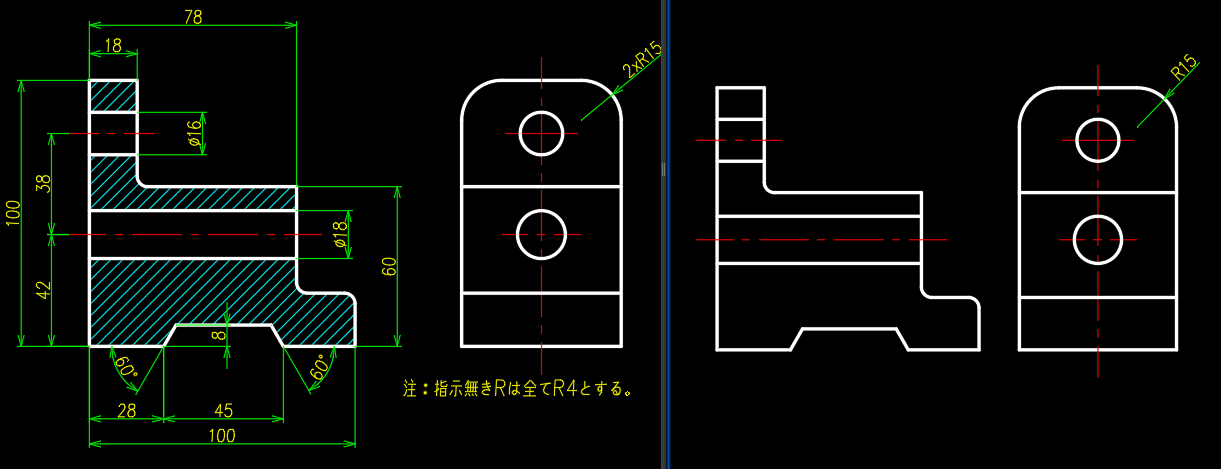
フィレット処理
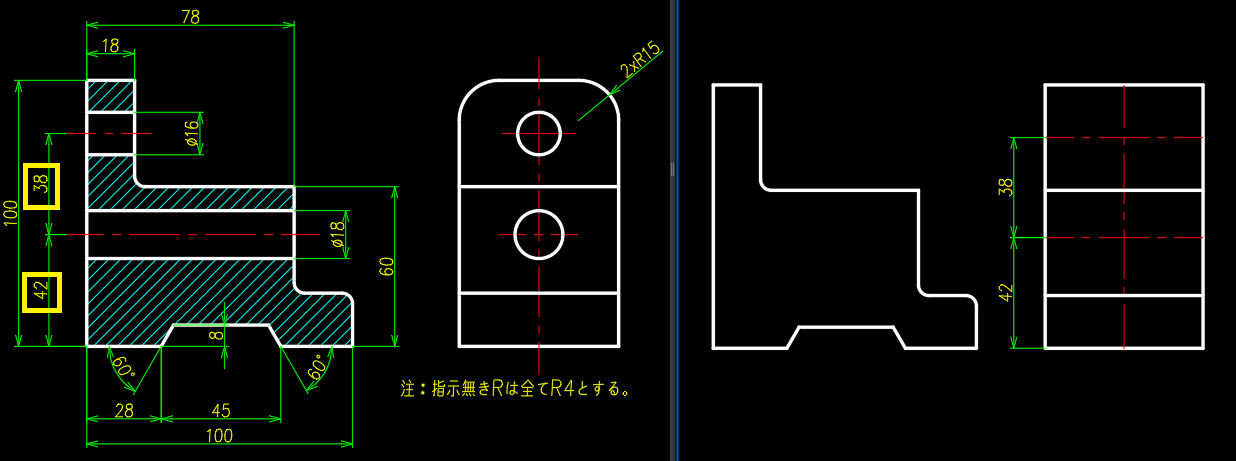
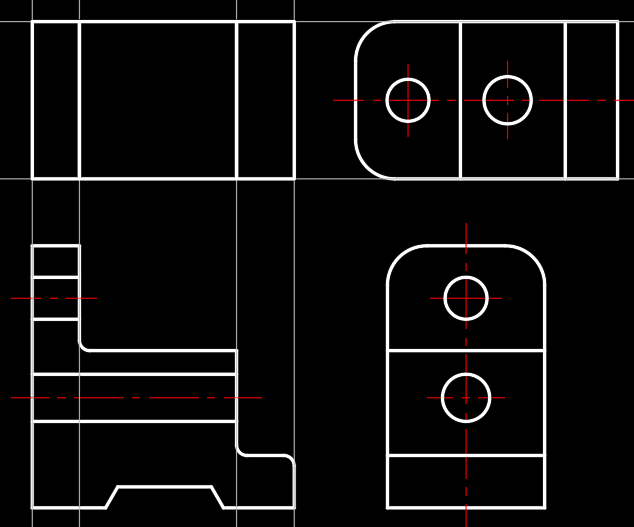
続いて、平面図作図の段取りを行います。
右側面図を複写し、90°回転します。
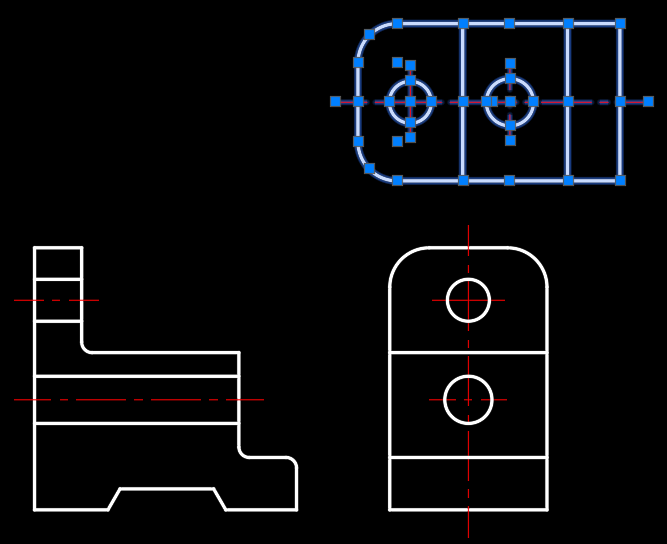
水平構築線・垂直構築線を作図
構築線は、レイヤ「 0 」に変更しておきます。
長方形、線分などでトレースします。
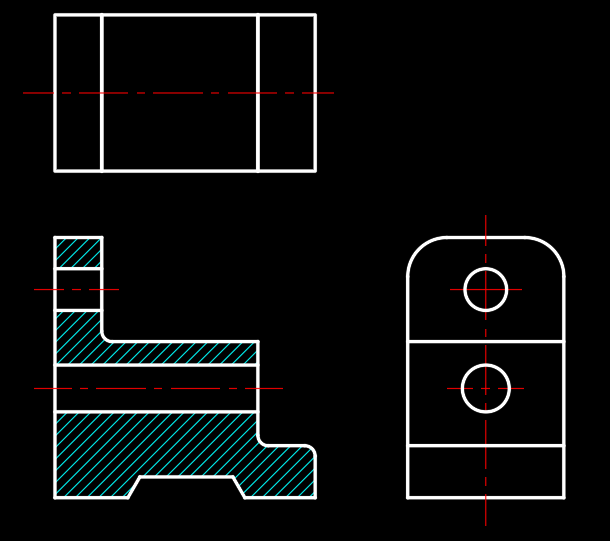
ハッチング
ハッチングは、JIS規格ではありませんが、業界標準のANSI31を使用しましょう。
ANSI(アンシ-)米国規格協会
(American National Standards Institute)
寸法を記入して完成です。
構築線&トレース法、如何でしたか?
複雑な図面も、構築線&トレース法で「正確に」「スピーディーに」作業を行うことができますよ。
このほかにも、いろいろなアプローチがあります。
次回は、通過点オフセット法などを解説します。お楽しみにして下さいね。
Archives
■第1話 2022年12月
メカトロニクスとは (メカトロニクス技術シリーズ)
日常生活に欠かせない技術、「メカトロニクス」について解説しました。「メカトロニクス技術」は、CAD/ロボット/コンピュータ/プログラミングなどを学ぶ受講生さんには必須ですが、これらの講座以外の受講生さんも知っておくと「ためになる」技術です。■第2話2023年1月
迷路探索ロボット マイクロマウスとは (メカトロニクス技術シリーズ)
大学や専門学校の「メカトロニクス技術」の授業は数式が多く、難解ですが、機械が初めての方にも「面白く、わかりやすい」ように、迷路探索ロボット「マイクロマウス」をテーマとして紹介しました。■第3話2023年2月
迷路探索ロボット マイクロマウスのメカニズム (メカトロニクス技術シリーズ)
R2-D2のような、コンパクトな足回りで動き回る、メカニズムを紹介しました。CAD講座で使用しているAutodesk社「Inventor」を使用してみました。■第4話2023年3月
迷路探索ロボット マイクロマウスのアクチュエータ (メカトロニクス技術シリーズ)
アクチュエータ(Actuator)【機械を動かす駆動部】についてお話しました。ステッピングモータ、DCモータなどが良く使われていますが、第4回は、皆さんの身の回りに沢山使われている、DCモータを動画で紹介しました。4月からCAD講座をスタートされる方、CAD講座受講中の方、CADに興味を持っている方、是非、お読みください。
皆さんの普段のトレーニングの励みになれば幸いです。■第6話2023年5月
迷路探索ロボット マイクロマウスのパワーソース(メカトロニクス技術シリーズ)
パワーソース【機械を動かすエネルギー源】についてお話しました。■第7話2023年6月
迷路探索ロボット マイクロマウスのセンサ(メカトロニクス技術シリーズ)
光電センサについてお話しました。浅野 健一
-
CAD
担当
横浜駅前校
所属
自動車部品メーカ/国鉄/専門学校教師を経て、現在、 RME株式会社代表取締役 ヒューマンアカデミー/ポリテクセンター/日本電子専門学校非常勤講師 生産技術/産業ロボット/電子機械システム設計が専門です。 第1級陸上無線技術士/電子科・機械科職業訓練指導員。どうぞ、宜しくお願いいたします。
この講師の記事を見る