

学びプラス情報
【CAD】マイクロマウスのメカニズムを徹底解説!
-
CAD
記事のカテゴリー
-
学習に役立つ豆知識・スキル
こんな方に読んでほしい
-
コンピュータ系講座受講生
-
ヒューマンで学習を開始したものの、なかなかモチベーションが上がらない受講生
記事から得られること
-
ロボットや家電製品、センサ、モータ、コンピュータ
-
世界での日本の技術の立ち位置、最新技術の動向と将来の予測
~迷路探索ロボット【マイクロマウス】のメカニズム~
メカニズム(Mechanism)とは「機構」のことで、生物の骨格に相当します。
2輪駆動・操舵方式とは?
スターウォーズのR2-D2の台車メカニズムです。
( R2-D2 → https://starwars.fandom.com/ja/wiki/R2-D2 )
2つの車輪を個別に回転することによって、全身/後退/スラローム/ブレーキなどの動作が出来ます。
また2つの車輪の一つを逆に回転することによって、その場回転ができます。
2足歩行のC-3POに比べると、R2-D2の動きは「コンパクトで軽やか」そして「可愛い」ですね。
( C-3PO → https://starwars.disney.co.jp/movie/lastjedi/character/c-3po.html )
今回は変則4輪駆動・操舵方式 マイクロマウス台車メカニズムを解説します。
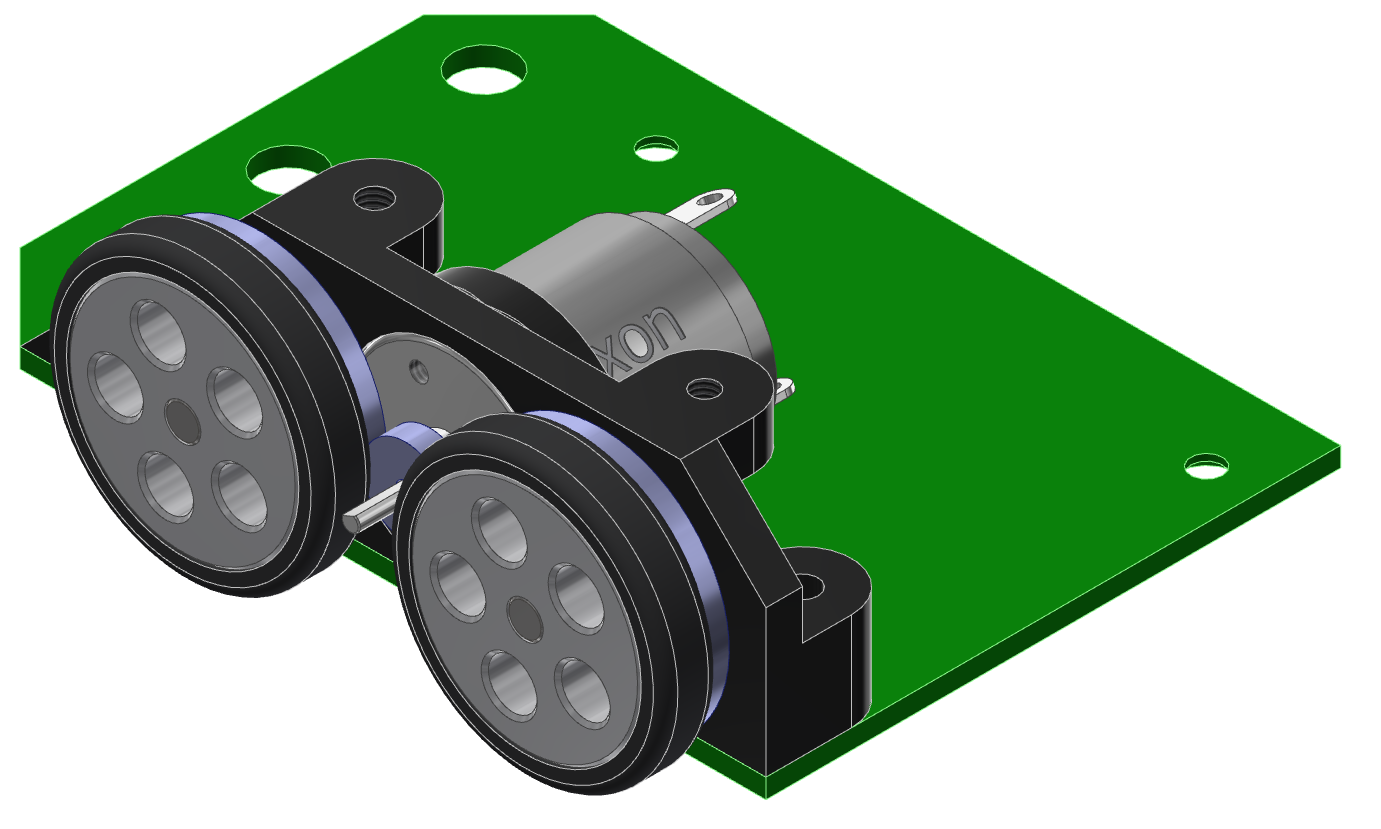
■ 【変則4輪駆動・操舵方式】
マイクロマウスメカニズム
今回は、【変則4輪駆動・操舵方式】マイクロマウスメカニズムを紹介します。
2輪駆動・操舵方式を4輪にしたもので、R2-D2のように、高速で小回りがきくところが特徴です。
また、自動車のようなデフギアが不要なので、構造がシンプルです。
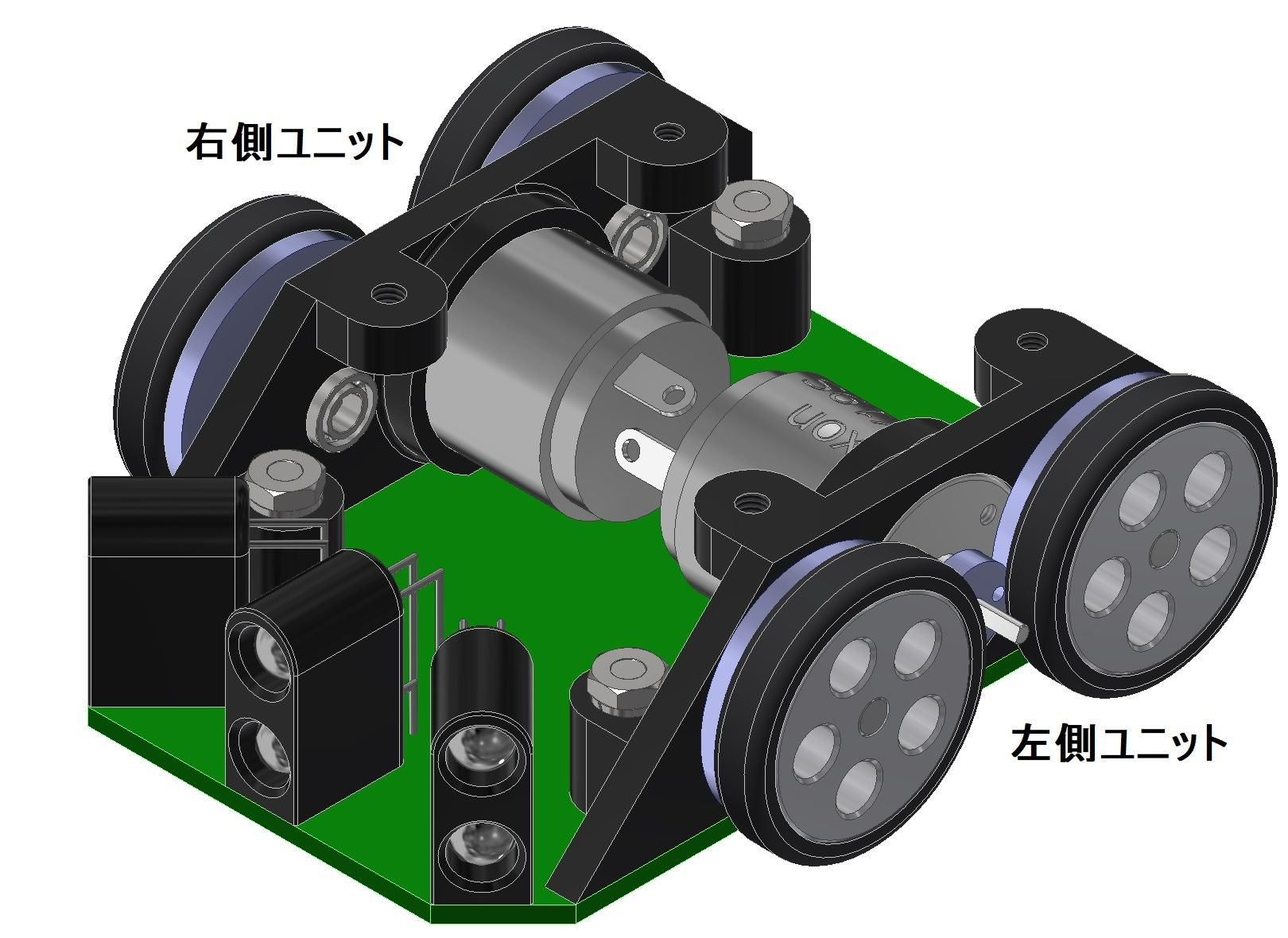
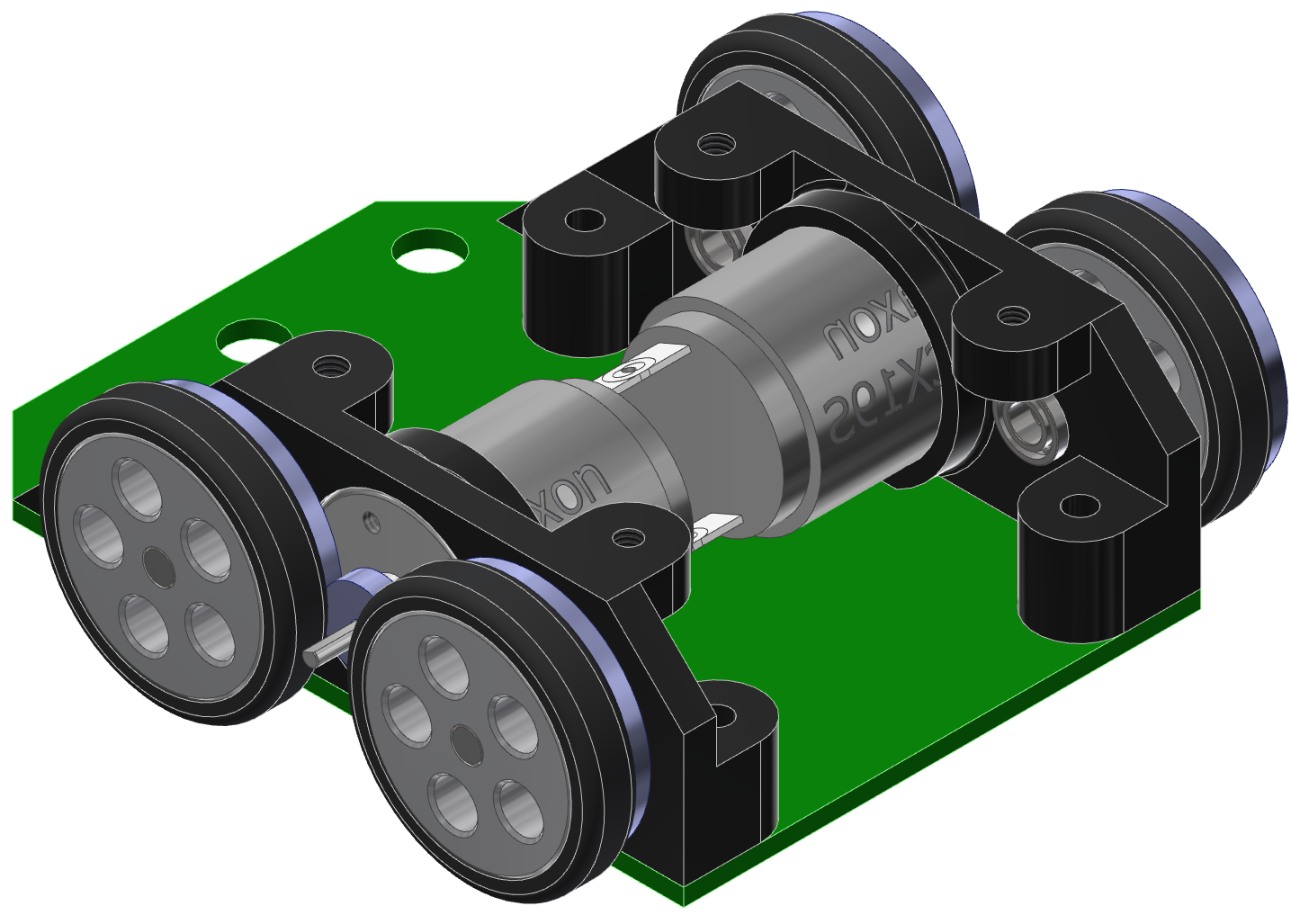
進行方向左側ユニット
1つのモータで2つの左車輪を回転します。
進行方向右側ユニット
1つのモータで2つの右車輪を回転します。
【変則4 輪駆動・操舵方式】
マイクロマウス
それでは、モータを作ってみましょう。
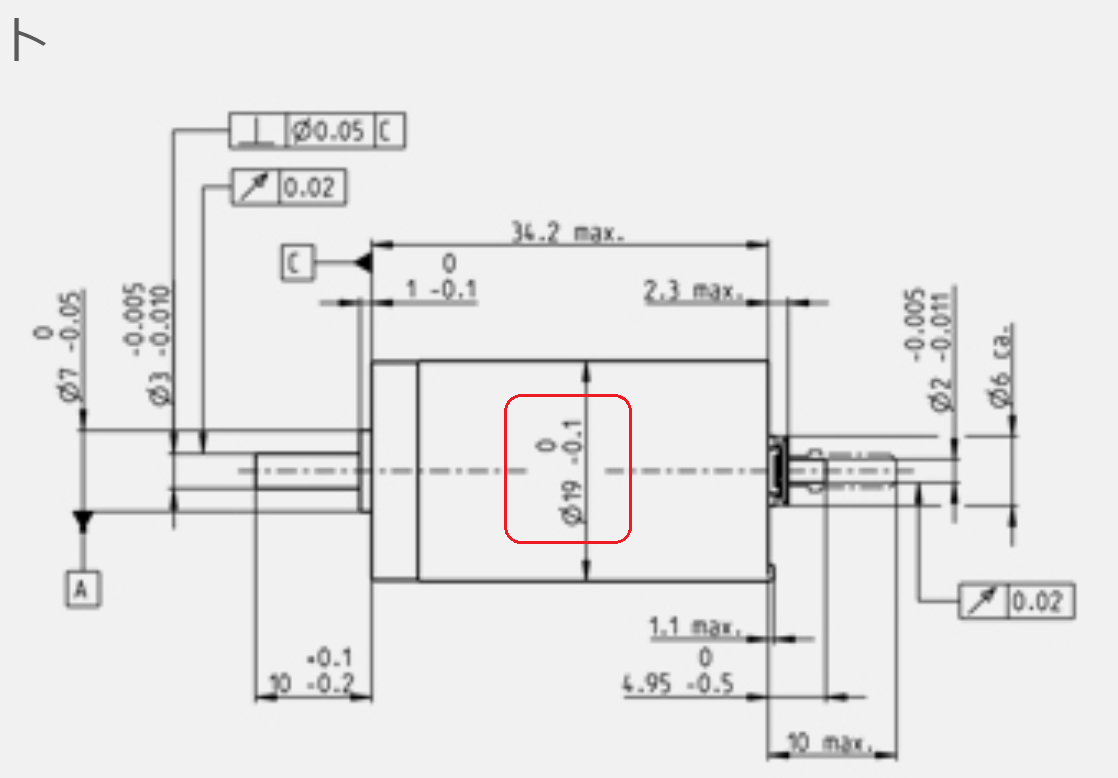
まず、モータメーカー各社のWebカタログから、モータを探します。
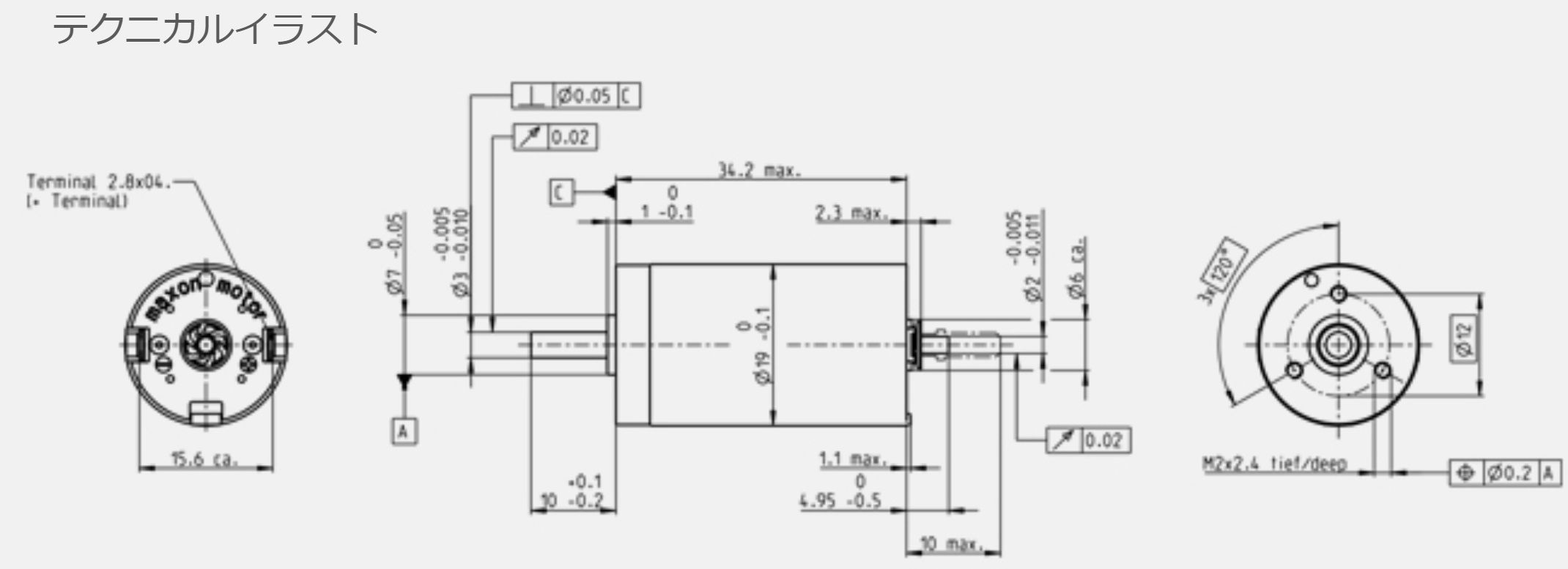
MAXONカタログより
https://www.maxongroup.co.jp/maxon/view
/product/motor/dcmotor/DCX/DCX19
/DCX19S01EBKL503
インターネットは便利ですね。
昭和40 年代は、厚さ 5 cm のカタログを取り寄せて、モータを選定していたんですよ!
CADオペレータ、ココにあり!
モータ、センサ、歯車などのメーカーでは、Webカタログを公開していますが、カタログには、非常に多くの図面が掲載されています。つまり、製品の数だけ図面があり、CADオペレータの出番ですよ!規格は超重要です!
互換性を保つため、製図には厳格な規格があります。日本の製造系企業では、JIS(日本産業規格)に準拠した製図ルールが使われています。JIS機械製図は、ヒューマンアカデミー 機械製図講座で解説しています。CADオペレータには図面を正しく読み取る能力が必須です。今回は、製造系3DCADシステムAutodesk Inventorを使用します。

Autodesk Inventorは、ヒューマンアカデミー Inventor講座で解説しています。VODは私、浅野が制作しました。(受講生の話では、越後弁で解説しているそうです。聞き苦しくてごめんなさい。)尚、Inventorは「発明者」の意味です。
パーツを新規作成します。
テンプレ-トは ja-JIS (日本産業規格) Standard.ipt を使用します。
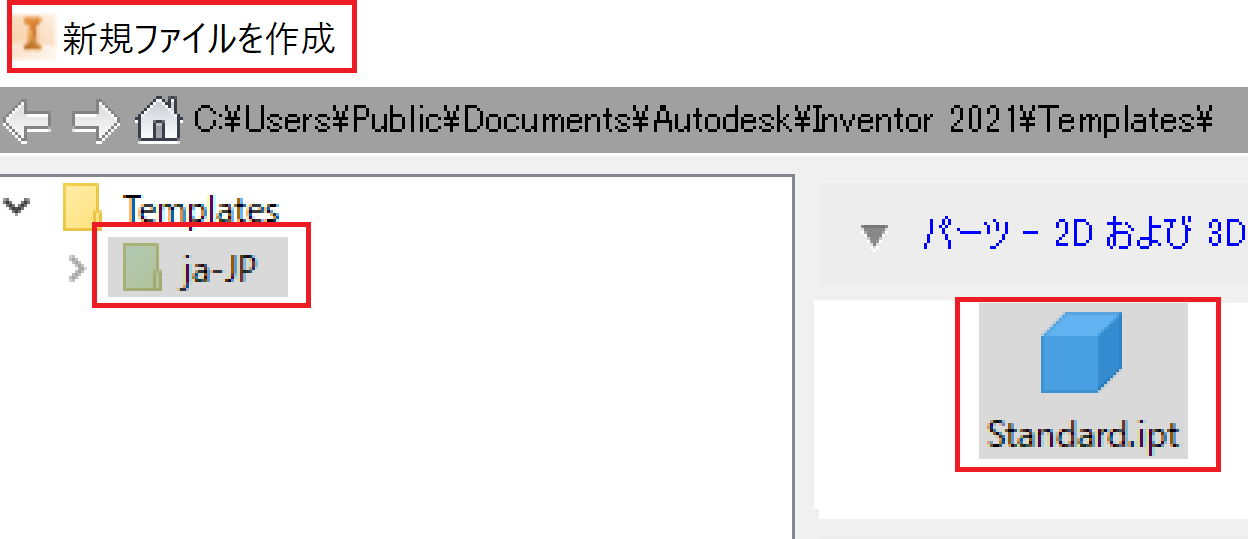
拡張子 ipt は Inventor Part の意味です。
起動時の3D空間には、座標系以外、何も存在しません。
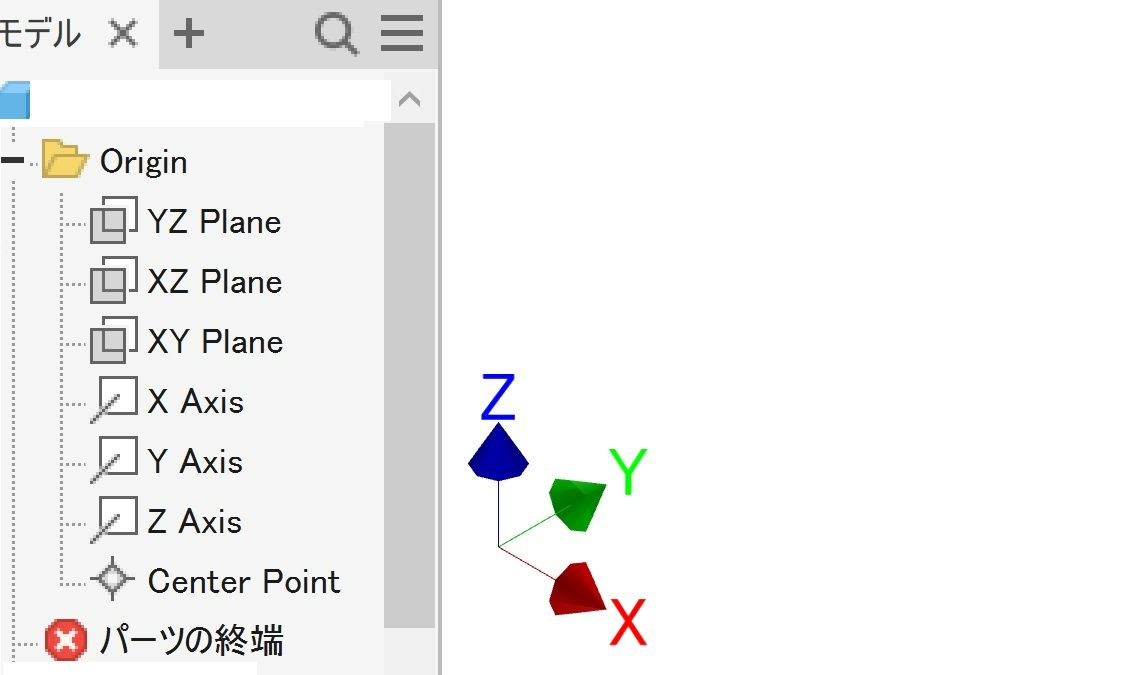
座標系
YZ、XZ、XY…….3つの平面(Plane)
X、Y、Z………….3つの軸(Axis)
原点……………. 1つの原点(Center Point)これらが設計の始まり・・・つまり、座標系はご先祖様です。
まるで、宇宙の始まり【ビッグバン】のようですね。
以下、モータのモデリング手順を紹介します。
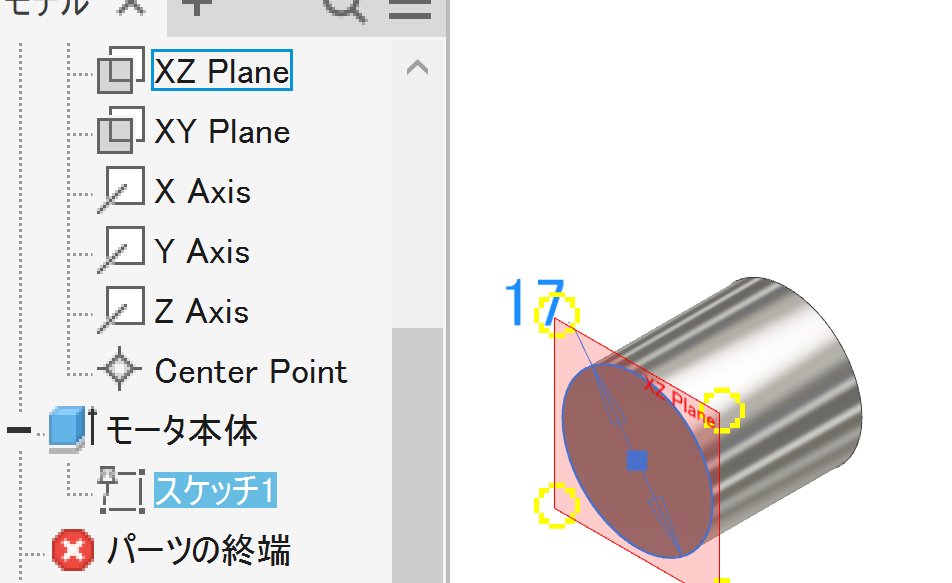
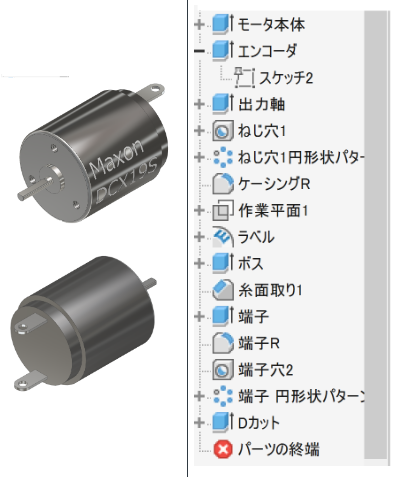
モータ本体部分を作ります。
図面に従って、XY平面に直径17mmの円をスケッチし、押し出します。
図面をよく見ると、直径19mmであることに気が付きましたので、
スケッチをダブルクリックして19mmに修正します。
設計変更が一発でできるのが、魅力ですね。
パラメトリック変形技術
大きさに無関係に、形から入り、後から寸法を変更する技術です。エンコーダ部分を作ります。
図面に従って、モータ本体の平面に直径15mmの円を
スケッチし、押し出します。
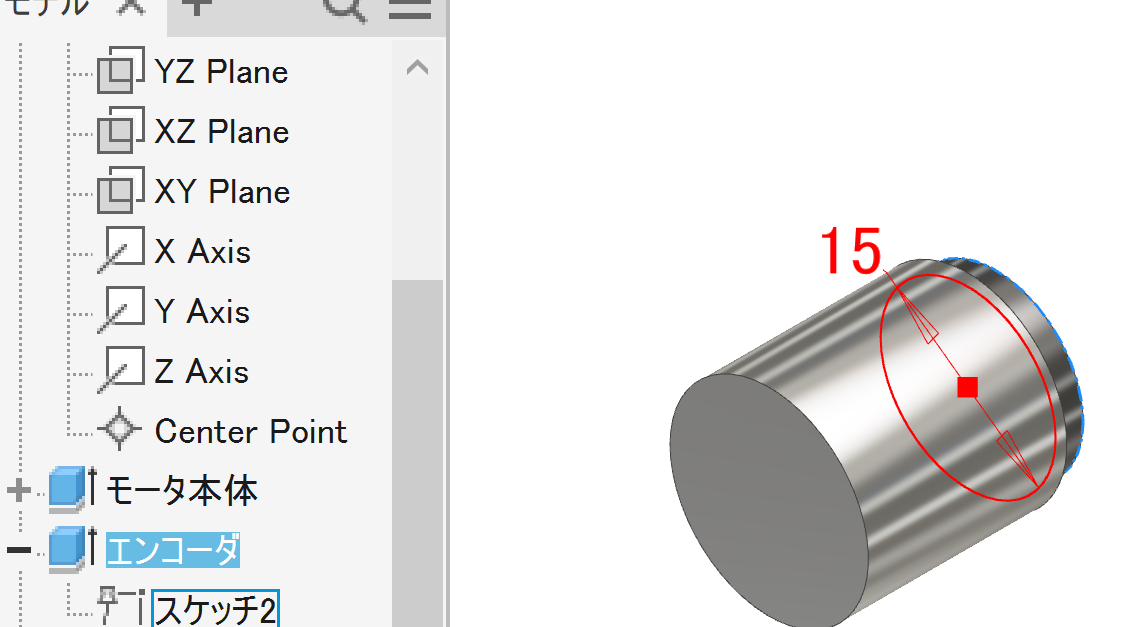
以下、図に示す手順により、モータの完成です。
以下、モータ以外のパーツをモデリングします。
紙面の都合により、作業手順は省略します。
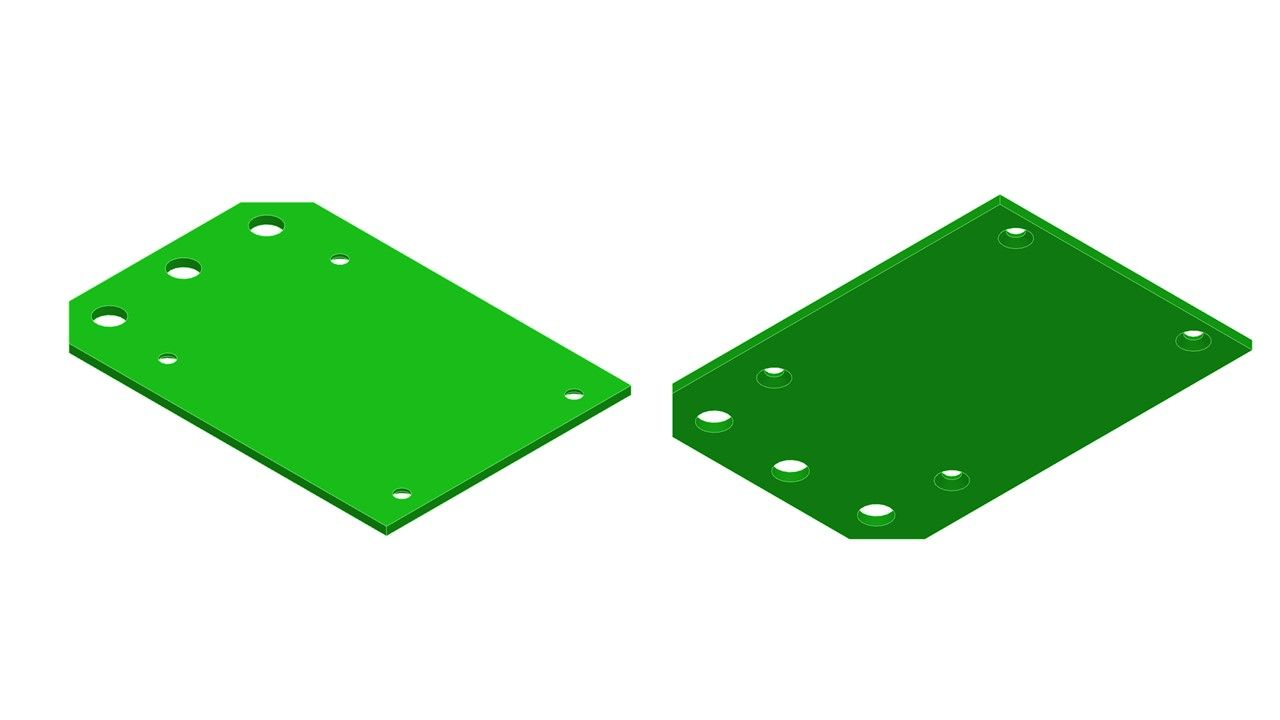
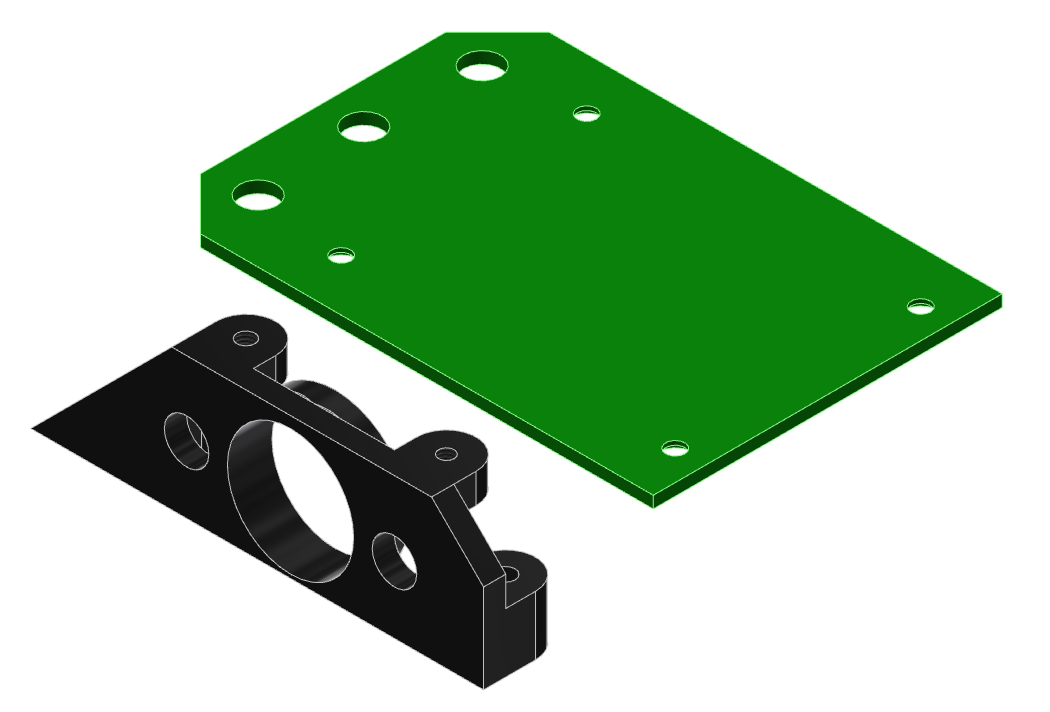
シャシ
シャシは、電子回路パーツを搭載するプリント基板を兼ねます。
材料はガラスエポキシ(複合材料)です。
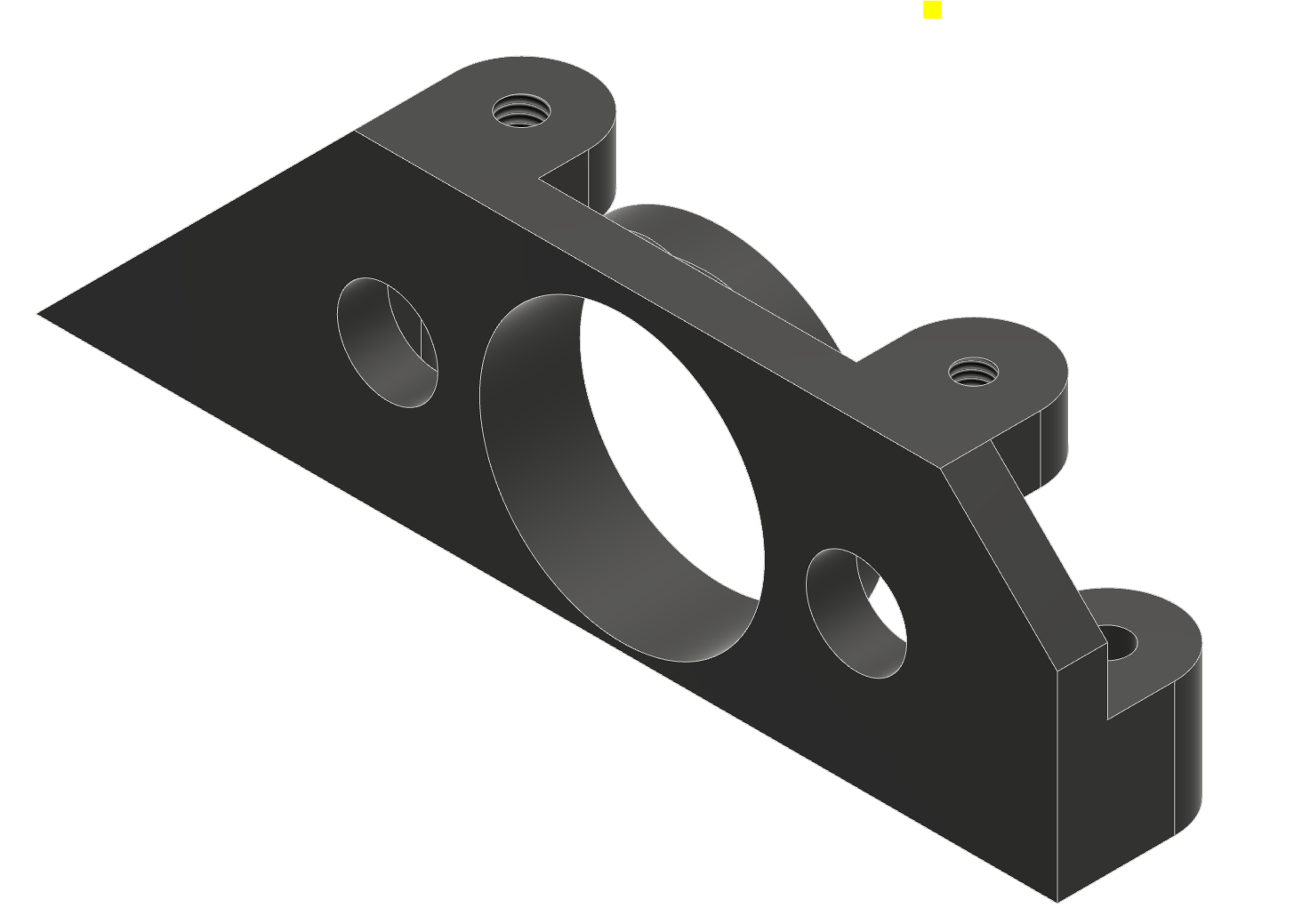
モータブラケット
モータブラケットは3Dプリンタで作ります。
アセンブリモデル
それでは、組付け(アセンブリ)を行ってみましょう。
アセンブリファイルを新規作成します。
テンプレ-トは ja-JIS (日本産業規格) Standard.iam を使用します。
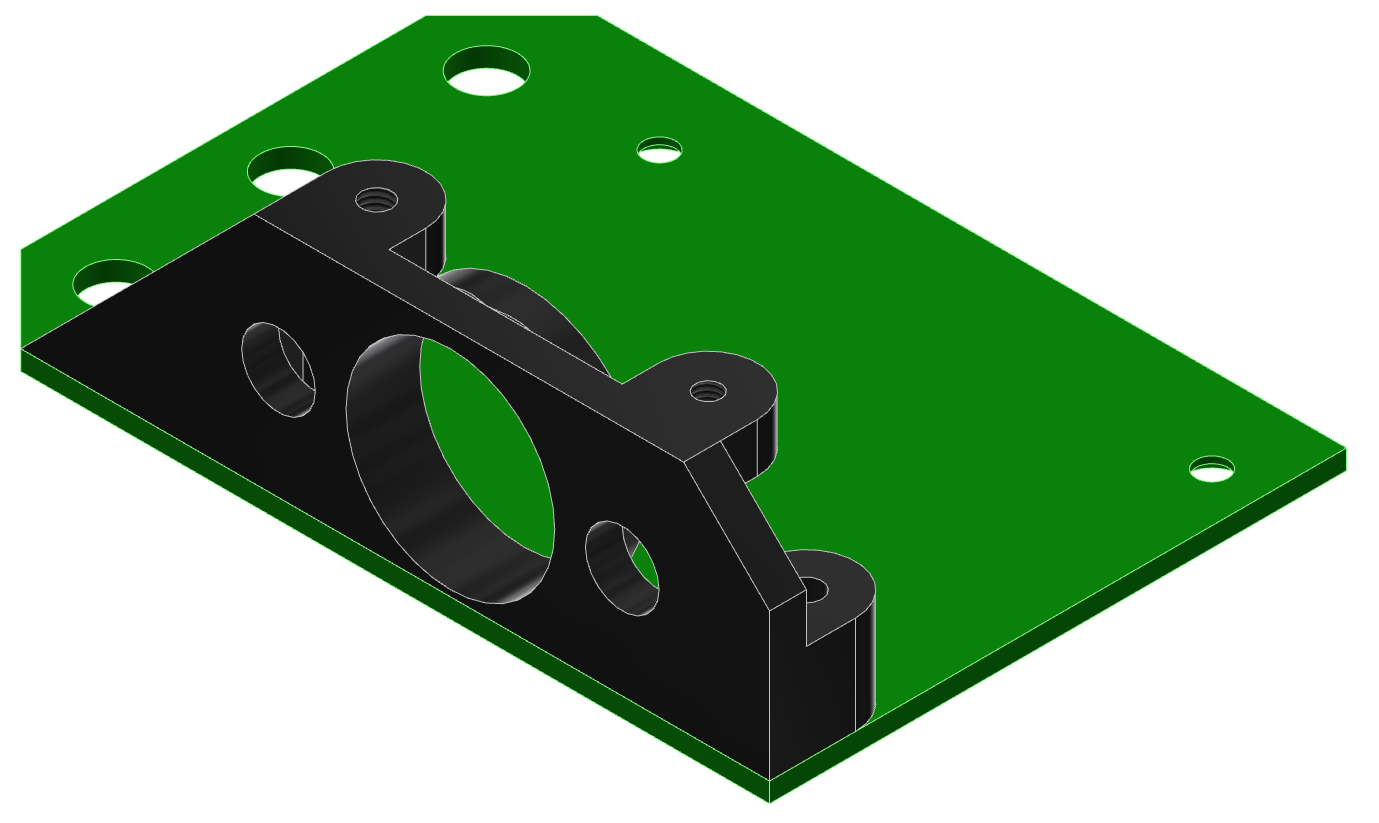
拡張子 iam はInventor Assembly Modelの意味です。シャシにモータブラケットを取り付けます。
皿穴とねじ穴の中心線を一致させます。
シャシとモータブラケットの面を密着させます。
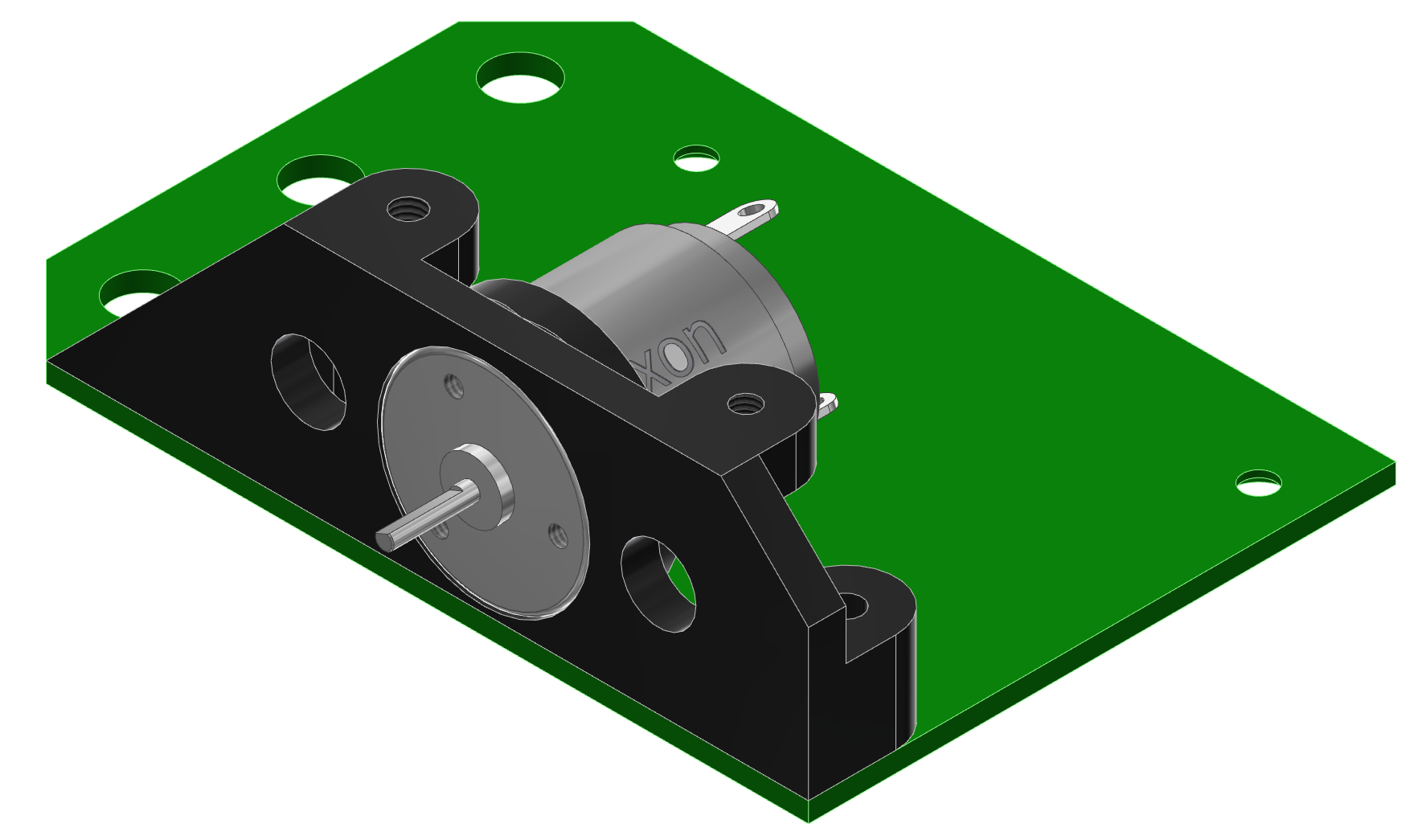
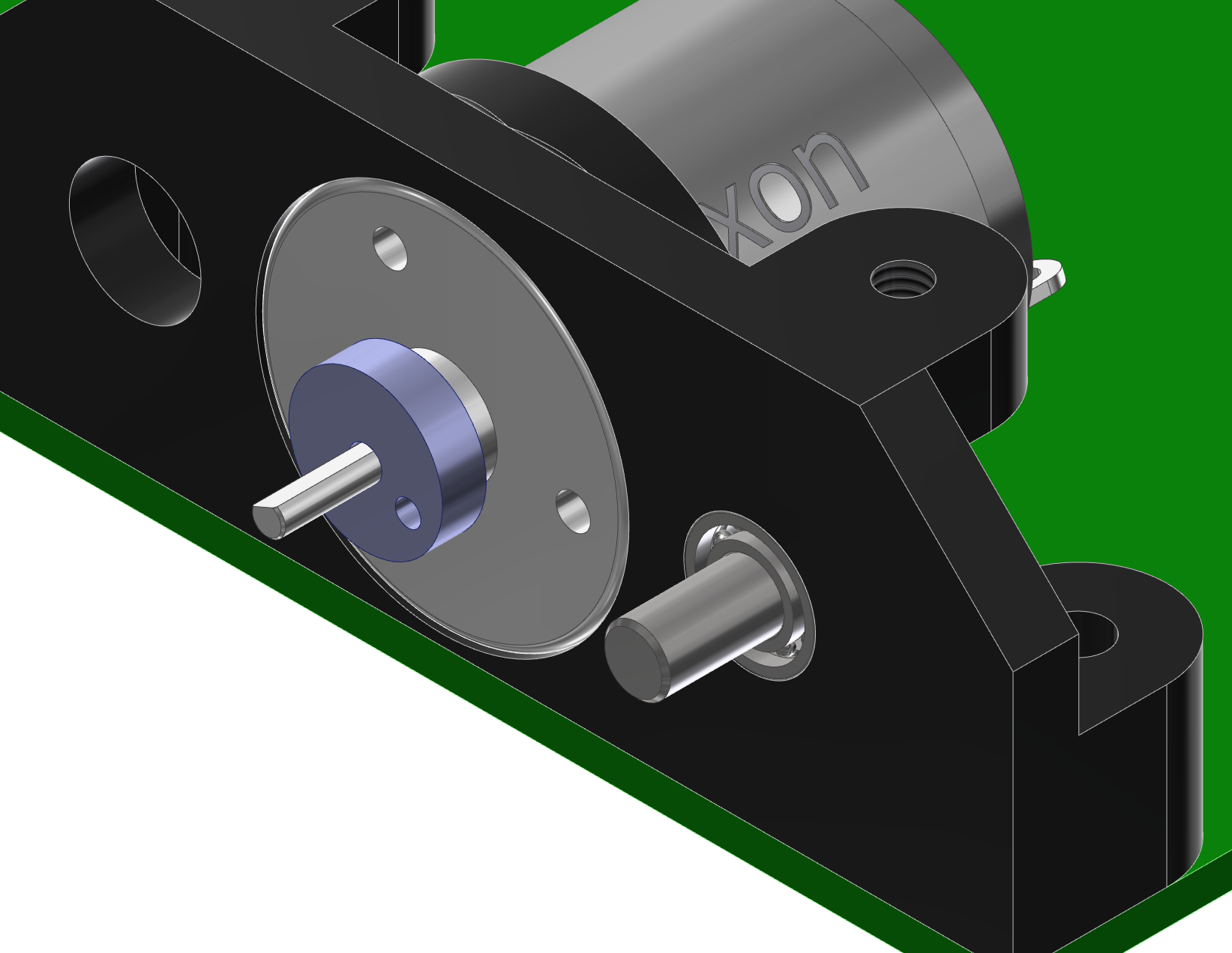
モータを挿入します。
ピニオンギアを取り付けます。
PCのシャットダウンに注意!
実際の歯車は複雑で多くの曲面を持っていますので、CPUに大きな負荷を掛けると同時にメインメモリを大量消費します。最悪の場合、PCがフリーズします。歯車を円柱で代用するのは、そのためです。カッコ良さよりも、納期優先
-----CADオペレータの合言葉です。カッコよさや美観は工業デザイナーさんに任せましょう!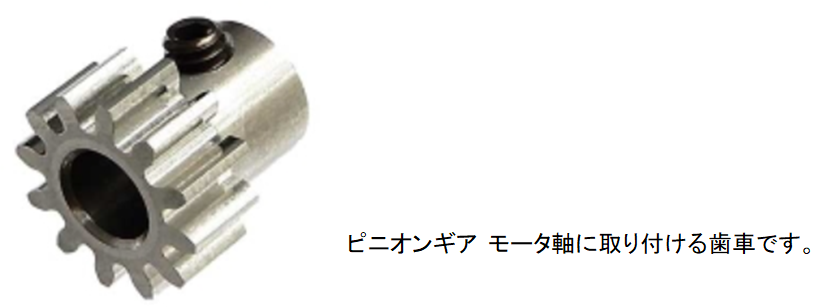
ボールベアリングを取り付けます。
2つ重ねて使用することにより、軸のブレがなくなります。
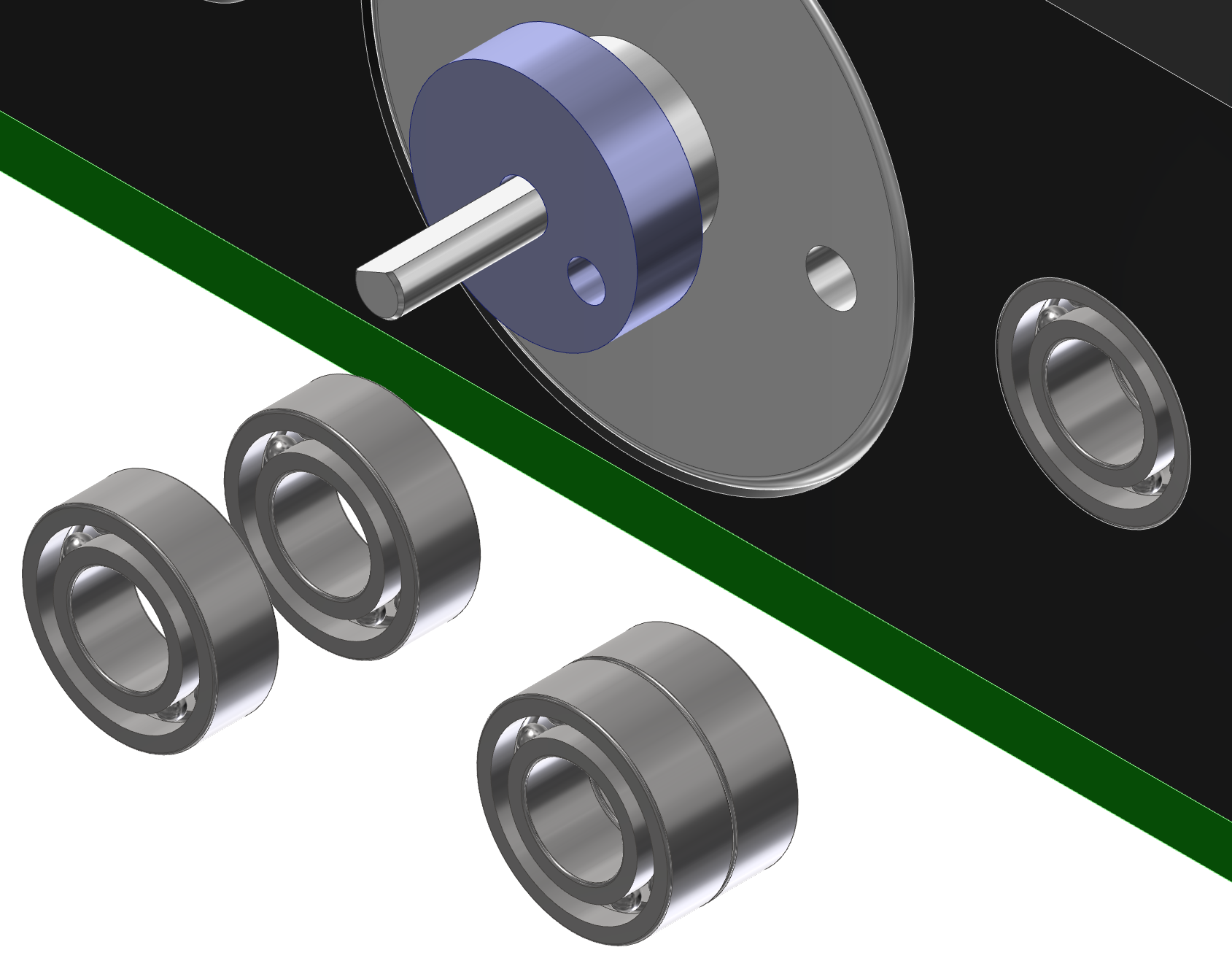
ボールベアリングに軸を挿入します。
軸に平歯車を挿入します。
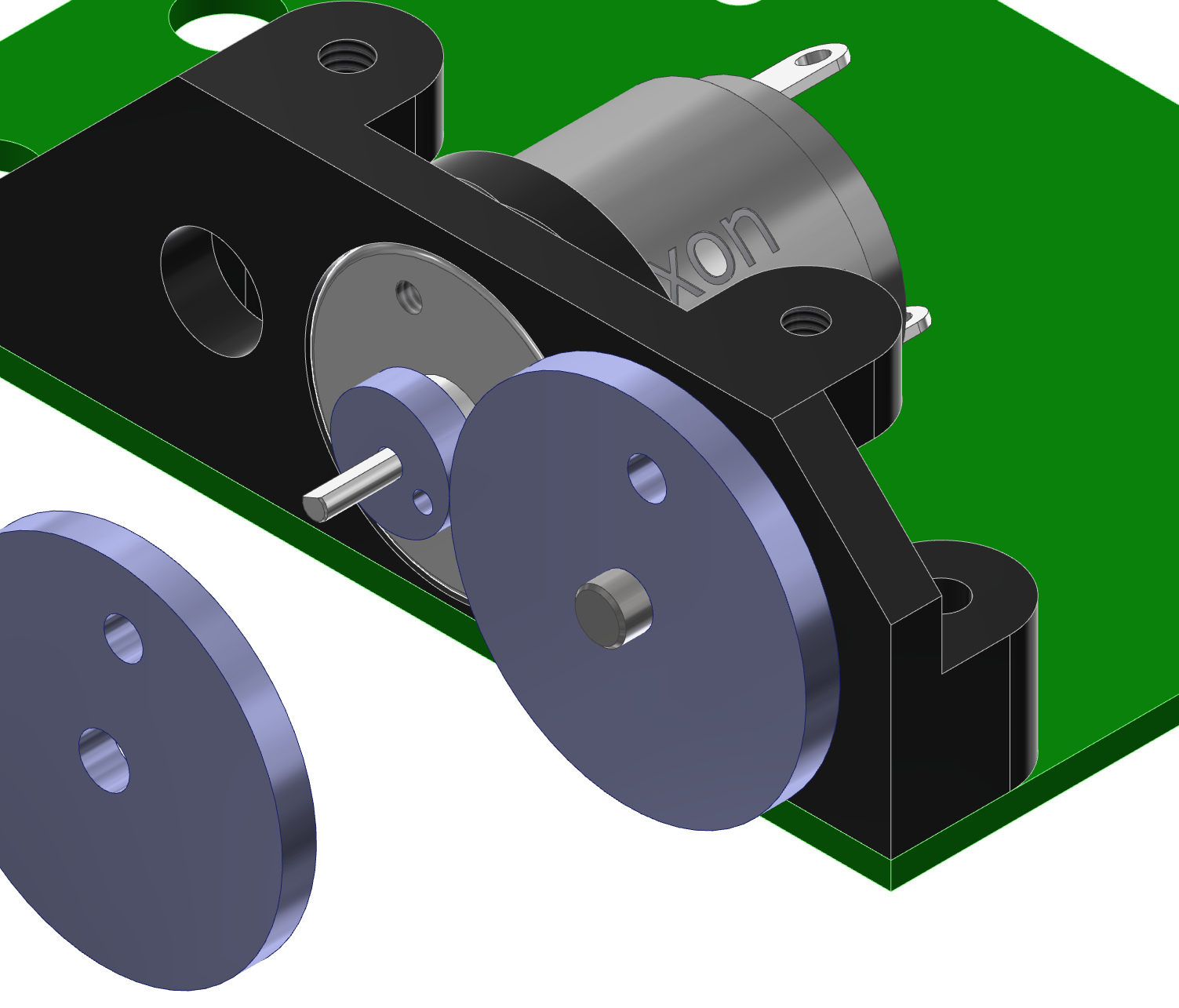
ギア比は 1:3 となります。
つまり、ピニオンが3回転すると、平歯車が1回転します。平歯車は3Dプリンタで加工します。
材料はナイロン6/6を使用します。
エンプラ(エンジニアリングプラスチック)
工業用の高強度のプラスチックをエンプラといいます。
ナイロン6/6はエンプラの代表格です。軸にホイールを挿入します。
ホイールは3Dプリンタで製作します。
材料はナイロン6/6を使用します。
色を変えているのは、設計し易くし、設計ミスを防止するためです。
タイヤを取り付けます。
タイヤはミニ4駆のタイヤを流用します。
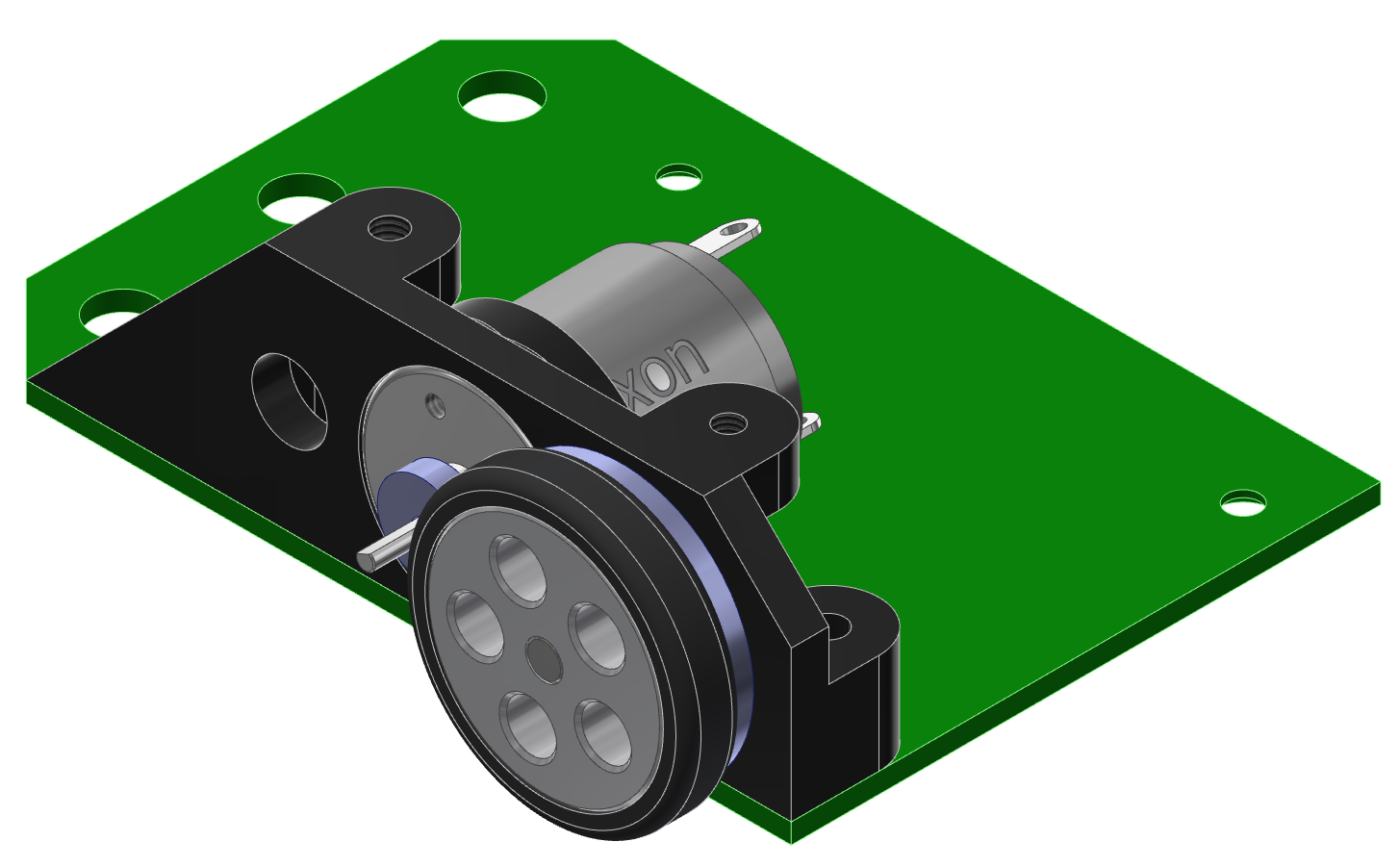
左側ユニット完成
右側ユニット完成
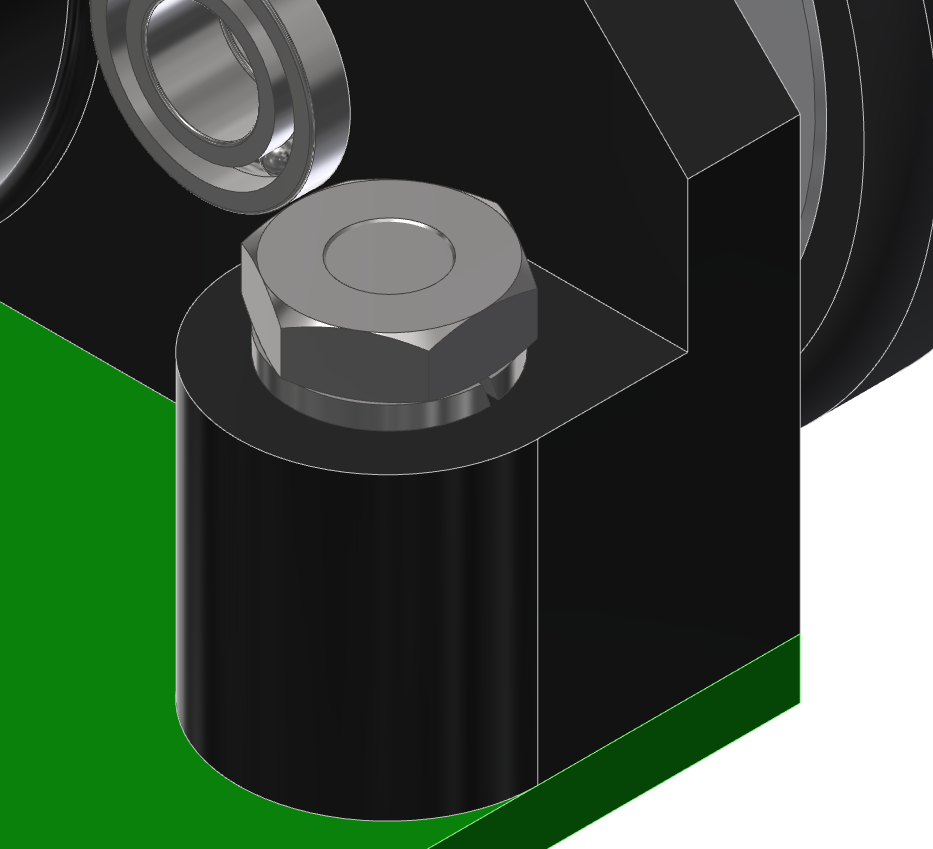
皿ねじを挿入し、
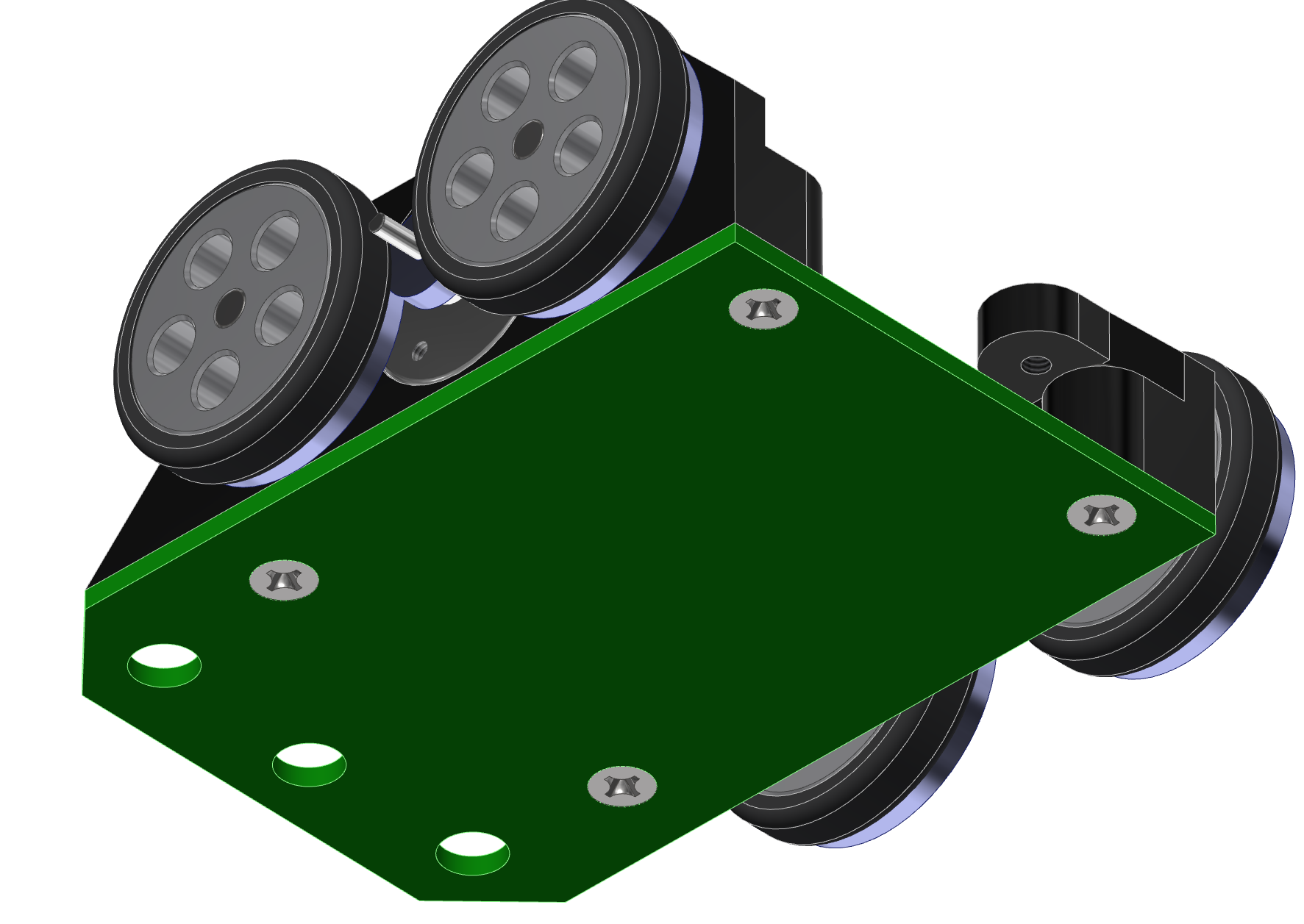
スプリングワッシャとナットで固定します。
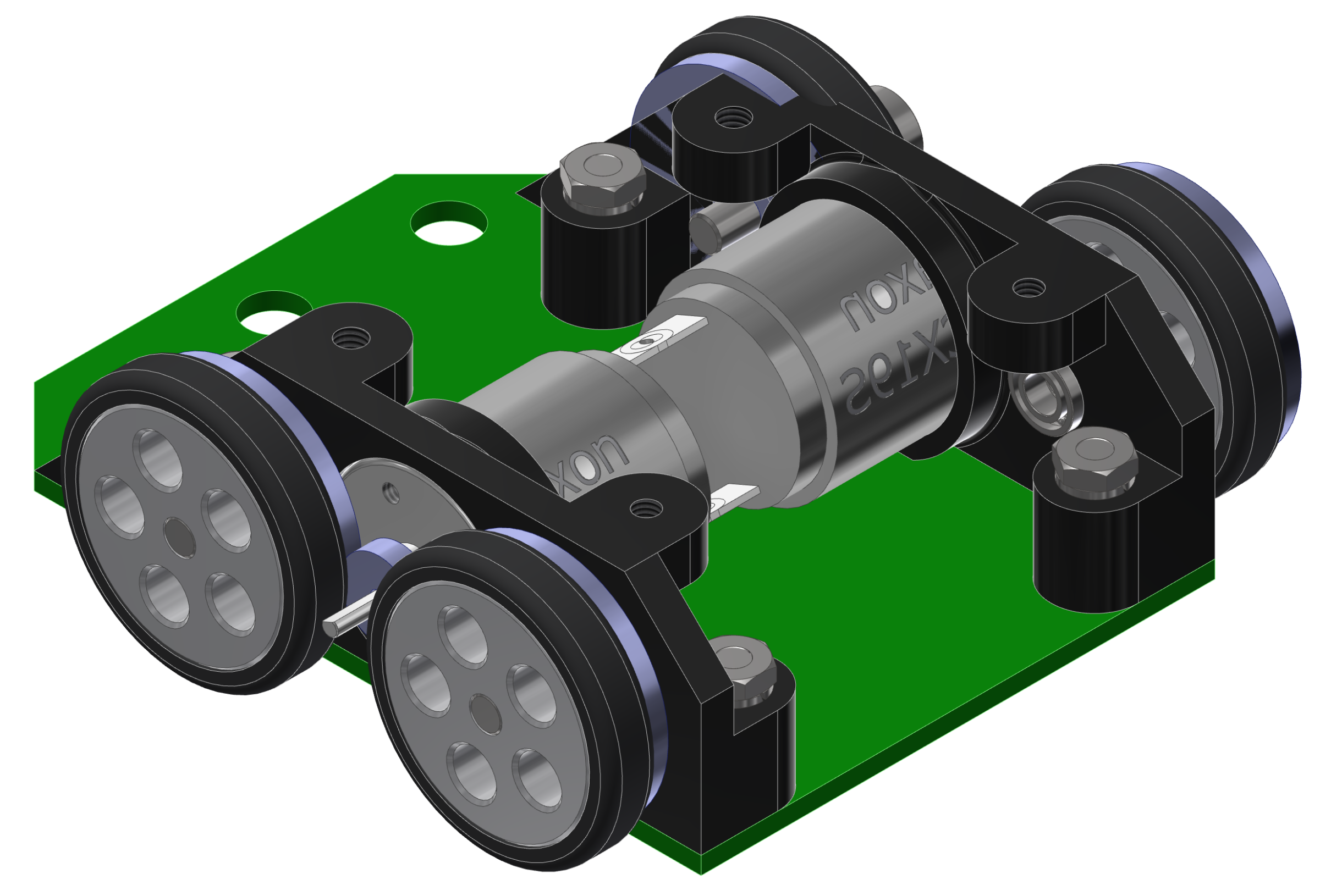
ロボットの振動により、ねじが緩まないように
スプリングワッシャを使います。
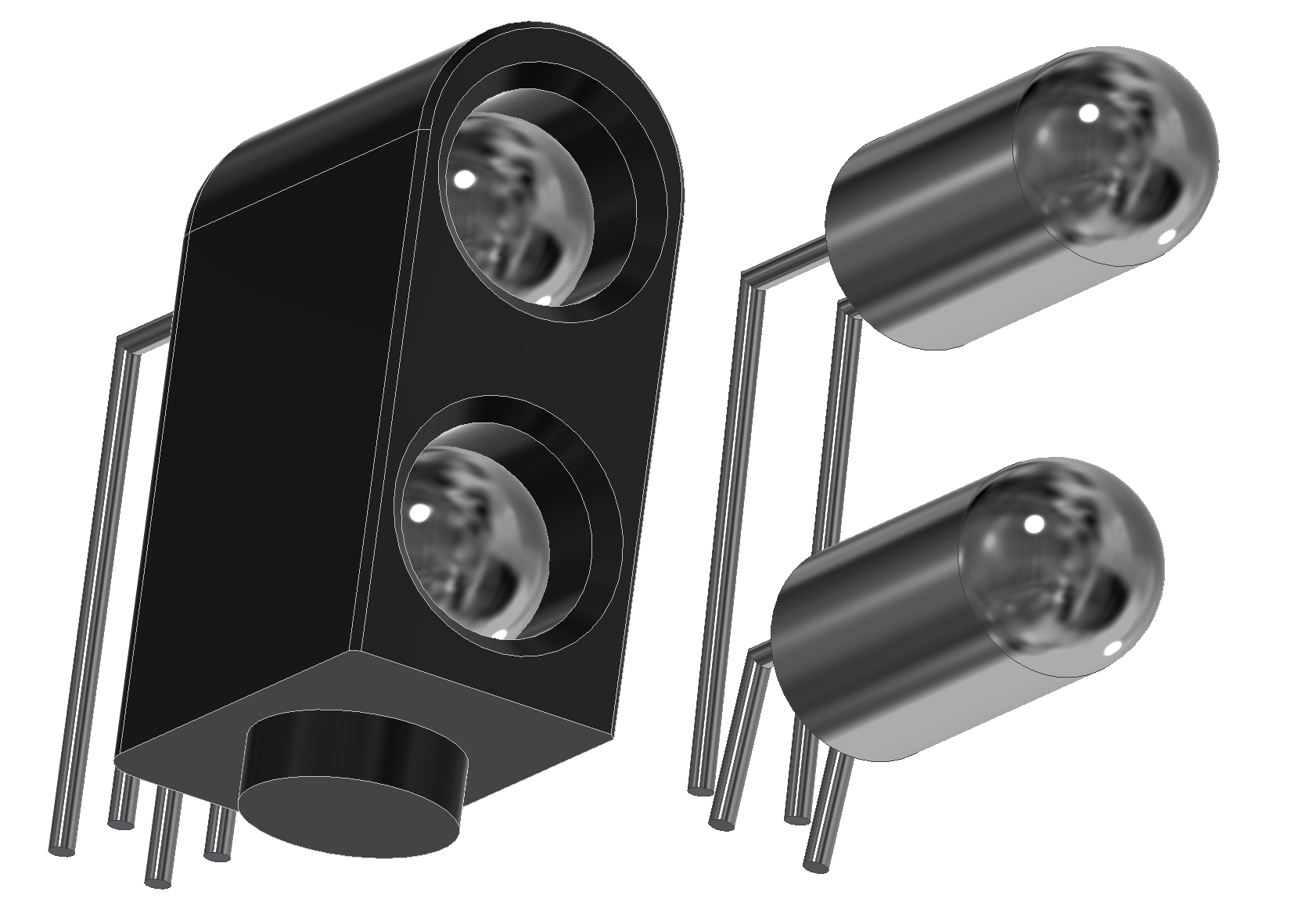
センサブラケットを制作します。
センサブラケットは3Dプリンタで加工します。
強度が不要なので、材料はあんかなもので構いません。
センサユニットの組付け
センサブラケットに、
赤外線LED(発光ダイオード)、
赤外線フォトトランジスタ
を挿入します。
センサの解説は、assist記事第6回を予定しています。
シャシにセンサユニットを取り付けて完成です!
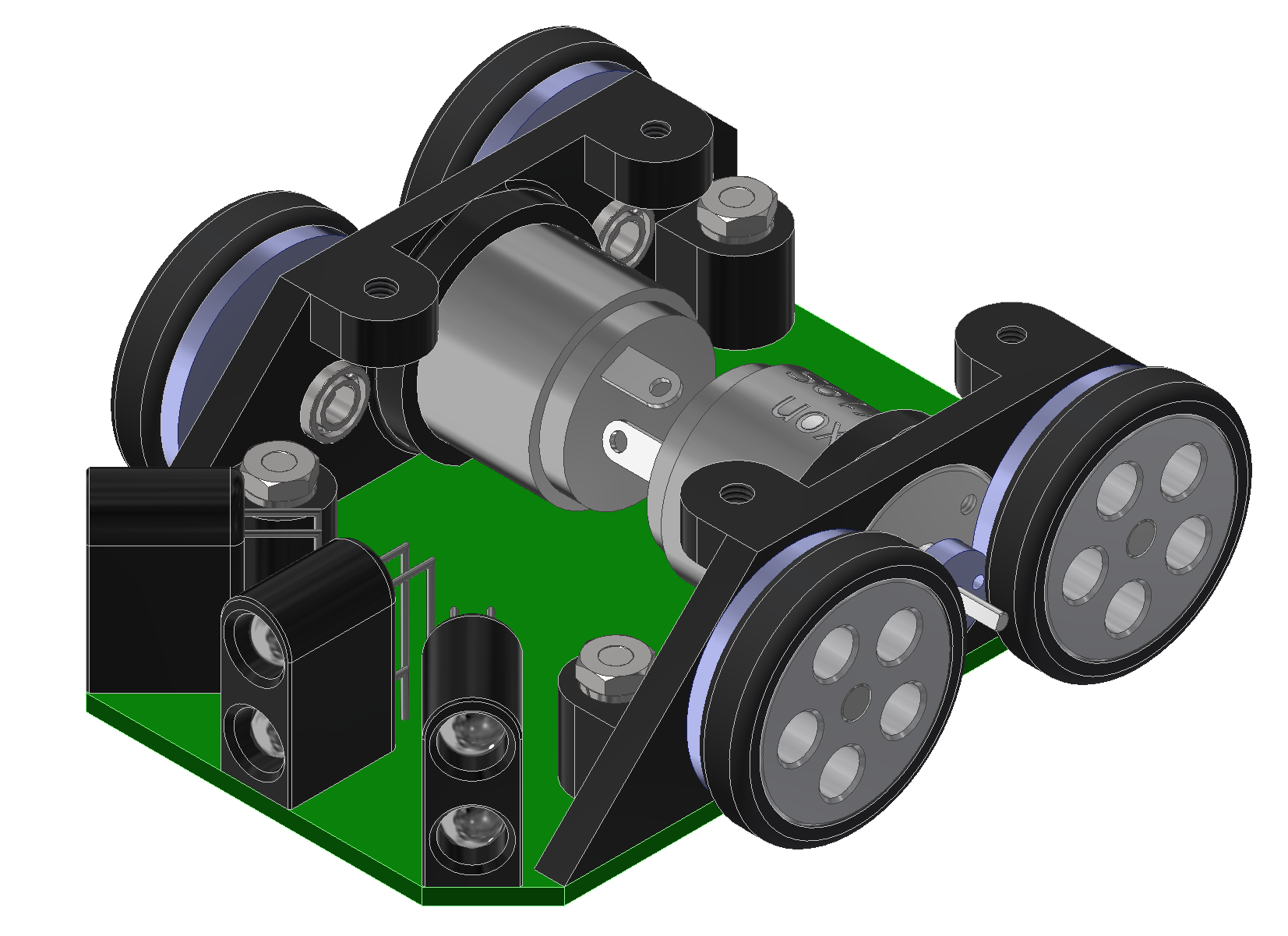
お疲れ様でした。
メカトロニクス技術は21世紀の日本をけん引する重要な技術ですから、
【学習に役立つ豆知識/スキル】 満載です。
第3話は、メカニズムのお話をしました。
第4話のテーマは、【マイクロマウスのアクチュエータ】です。
3Dプリンタに使われているステッピングモータや、DCモータなどのお話です。
どうぞ、お楽しみに。
参考サイトURL
公益財団法人ニューテクノロジー振興財団 2022年全日本学生マイクロマウス大会
https://www.youtube.com/watch?v=RattIXpA8OI
公益財団法人ニューテクノロジー振興財団 マイクロマウス大会ルール
https://www.ntf.or.jp/?page_id=118
R2-D2
https://starwars.fandom.com/ja/wiki/R2-D2
C-3PO
https://starwars.disney.co.jp/movie/lastjedi/character/c-3po.html
浅野 健一
-
CAD
担当
横浜駅前校
所属
自動車部品メーカ/国鉄/専門学校教師を経て、現在、 RME株式会社代表取締役 ヒューマンアカデミー/ポリテクセンター/日本電子専門学校非常勤講師 生産技術/産業ロボット/電子機械システム設計が専門です。 第1級陸上無線技術士/電子科・機械科職業訓練指導員。どうぞ、宜しくお願いいたします。
この講師の記事を見る